数据导入
新建项目选择激光雷达

不同厂商解算出的数据略有区别,建议参考该文档导入数据: 激光雷达数据导入说明
导入图像、点云

导入图像:
选择图像导入到当前任务。
导入图像文件夹:
选择指定文件夹,可将文件夹中所有图像导入到当前任务。

导入点云:
选择点云导入到当前任务。
导入点云文件夹:
选择指定文件夹,可将文件夹中所有点云导入到当前任务。
导入预制数据:
点击 ,选择mpl文件可快捷导入所有数据。
,选择mpl文件可快捷导入所有数据。
编辑相机
软件会自动解析导入照片的文件结构和照片信息,并根据照片中的相机参数(焦距、传感器尺寸、内参、畸变等)自动将照片分组到不同的相机。
若照片中无法解析到相机参数,或者相机参数不正确,则需要编辑相机参数。建议从数据库中选择所使用设备的相机参数。

选择正确的相机类型、填写焦距、像主点、畸变参数。
计算像素焦距:点计算图标,可填入相机物理焦距及传感器尺寸,计算出对应的像素焦距。
固定参数:可选择需要固定的相机参数,固定的参数软件将不会优化,保持不变。
导入opt文件:可导入相机参数opt文件,自动识别并填写相机参数。
从数据库中选择:可从内置数据库中选择对应的相机参数,若数据中没有当前型号的相机,则无法选择。
保存到本地数据库:可将当前相机参数保存到本地数据库,后续可在数据库中选择使用。
合并相机:可在左侧列表按住shift+鼠标左键点击相同参数的相机进行合并。
删除相机:点击删除图标可以删除该相机,同时也会删除其中已导入的照片。
编辑POS
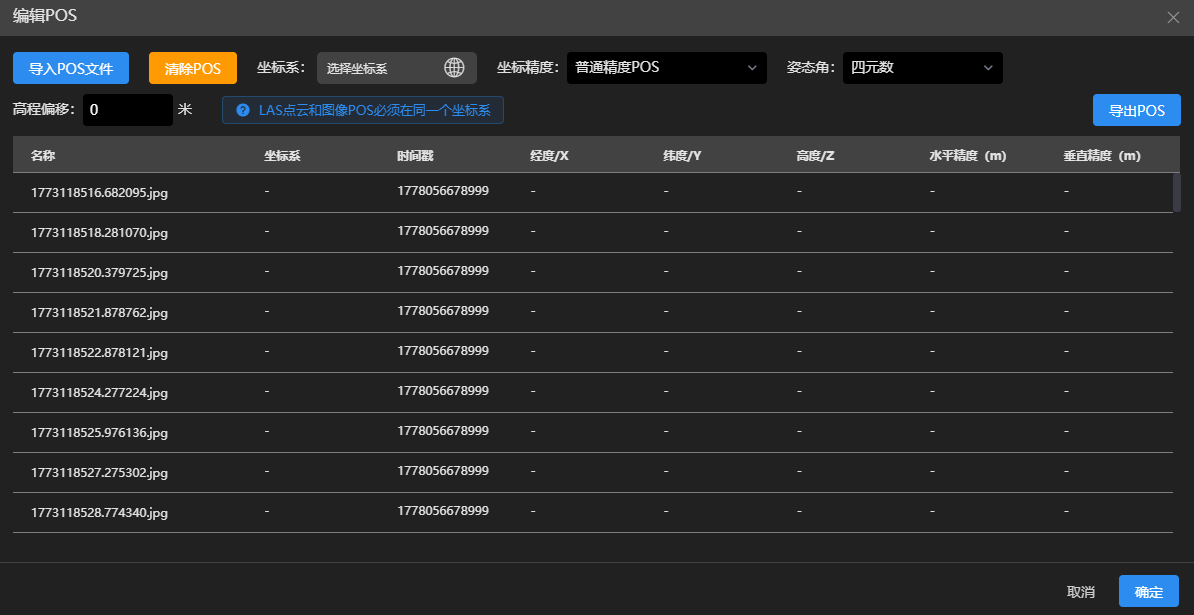
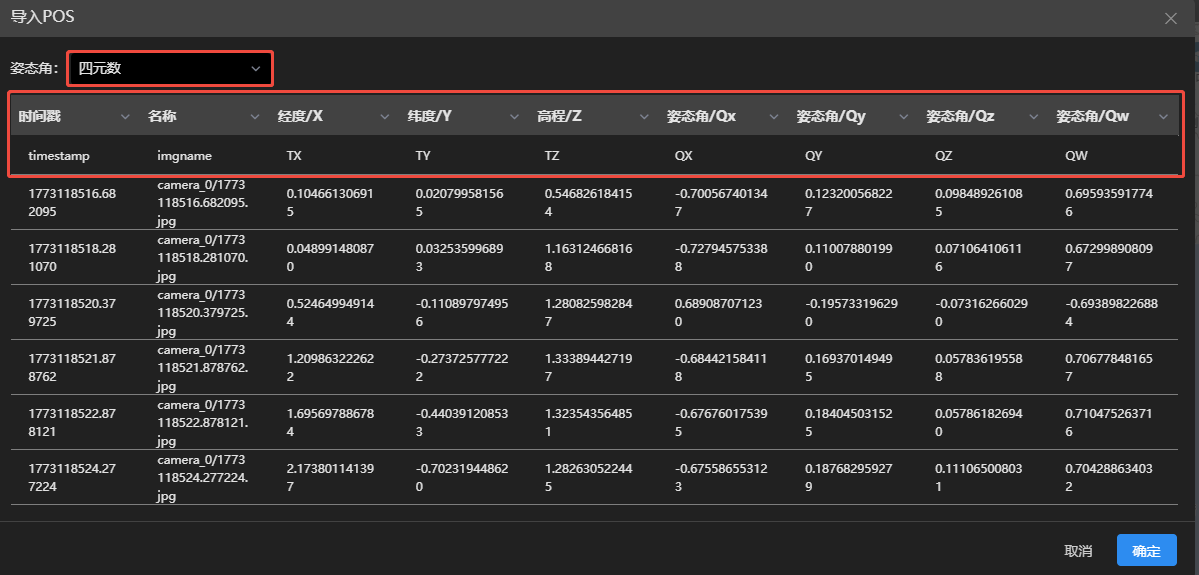
导入POS文件:
 选择POS文件导入,姿态角下拉框选择相应的姿态角,每列表头下拉框选择该列相应的POS信息
选择POS文件导入,姿态角下拉框选择相应的姿态角,每列表头下拉框选择该列相应的POS信息清除POS:
 清除当前任务所有图像的POS信息
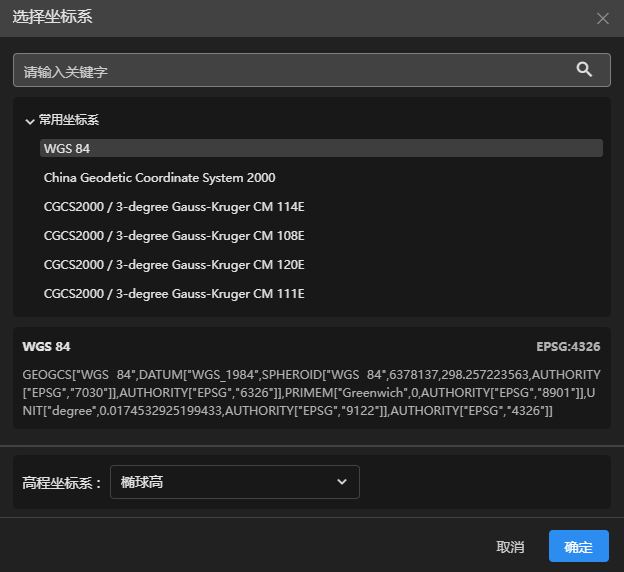
清除当前任务所有图像的POS信息坐标系:
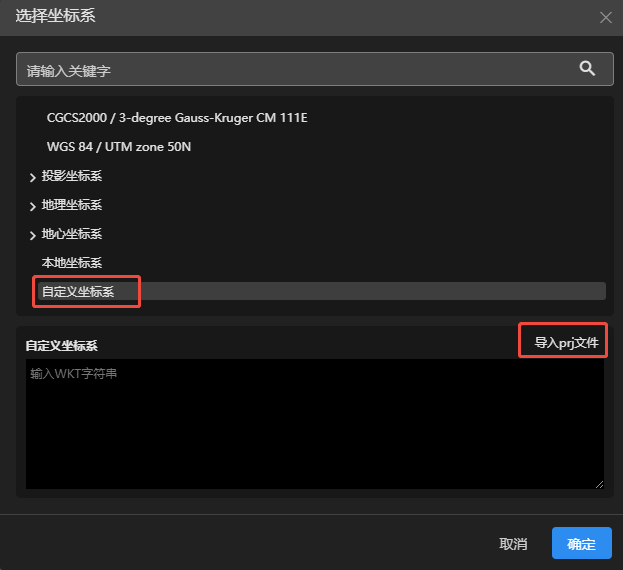
 需选择与POS信息相对应的坐标系与高程系,可通过关键字搜索。若POS为自定义坐标系,则需导入prj文件。
需选择与POS信息相对应的坐标系与高程系,可通过关键字搜索。若POS为自定义坐标系,则需导入prj文件。
注意:LAS点云和图像POS必须在同一个坐标系
- 坐标精度:可选择当前POS信息的精度,建议根据采集设备实际情况选择。激光雷达默认为高精度POS。
高程偏移:可输入高程偏移值,当前POS信息中所有高程均按输入值整体偏移。
导出POS:可将当前POS信息导出至指定文件夹,格式为CSV。
删除图像、点云
若导入的图像或点云有多余的、不需要重建的,可进行删除。
列表删除

1、可将该点云或相机的图像进行删除。
2、可将任务中所有点云或图像进行删除。
框选删除
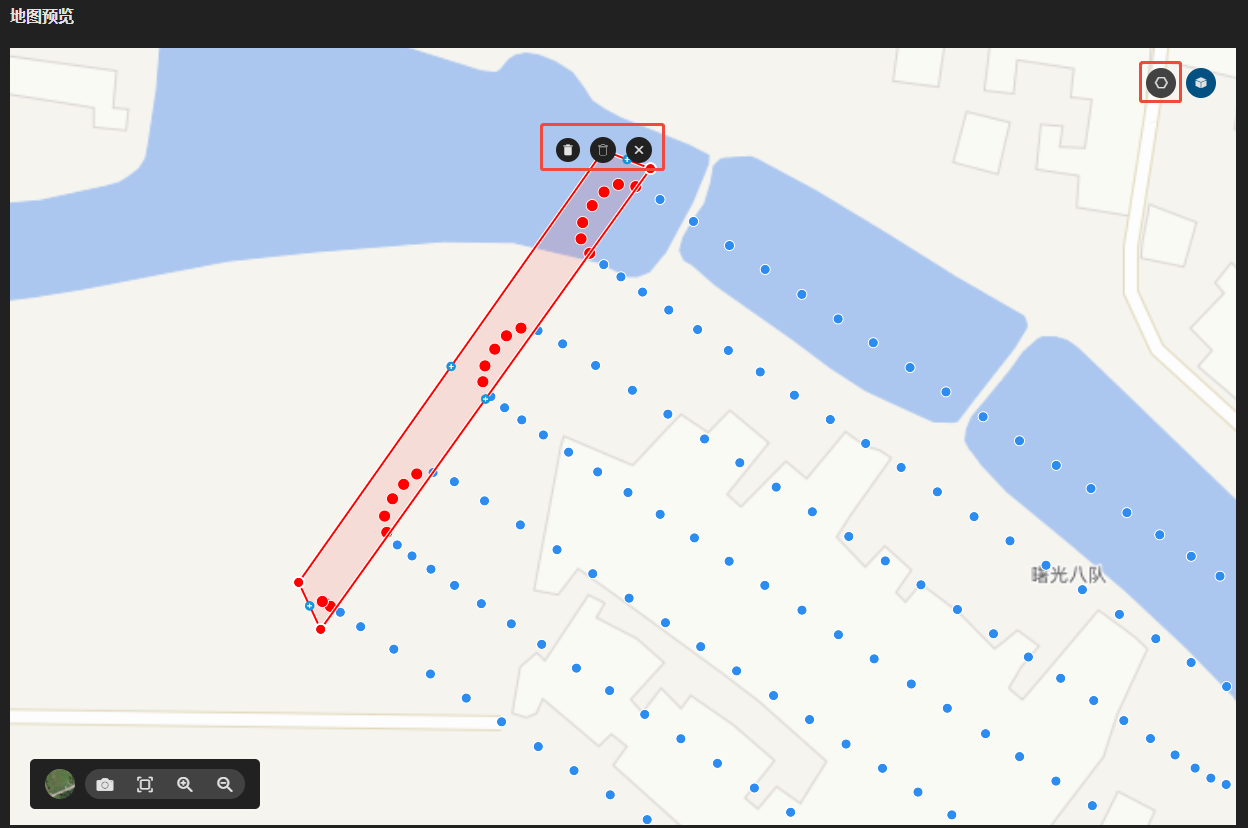
点击
 图标,可在地图预览界面圈选照片进行删除,被删除的照片将不参与重建。
图标,可在地图预览界面圈选照片进行删除,被删除的照片将不参与重建。在地图上点击鼠标左键或点击
 新建顶点,双击鼠标左键结束绘制;鼠标右键点击顶点可删除顶点,按住鼠标左键可拖动顶点。
新建顶点,双击鼠标左键结束绘制;鼠标右键点击顶点可删除顶点,按住鼠标左键可拖动顶点。点击
 可删除绘制范围内的照片,点击
可删除绘制范围内的照片,点击 可删除绘制范围外的照片,点击
可删除绘制范围外的照片,点击 取消当前操作。
取消当前操作。