查看报告

点击查看报告,可以查看该任务的重建报告和标注报告。
点击左上角可切换报告,点击右上角 可下载pdf格式的报告文件。
可下载pdf格式的报告文件。
重建报告
任务概览
记录任务名称、任务类型、数据采集时间、照片数量、任务起止时间、总耗时、空三与重建耗时。
附图为任务缩略图。

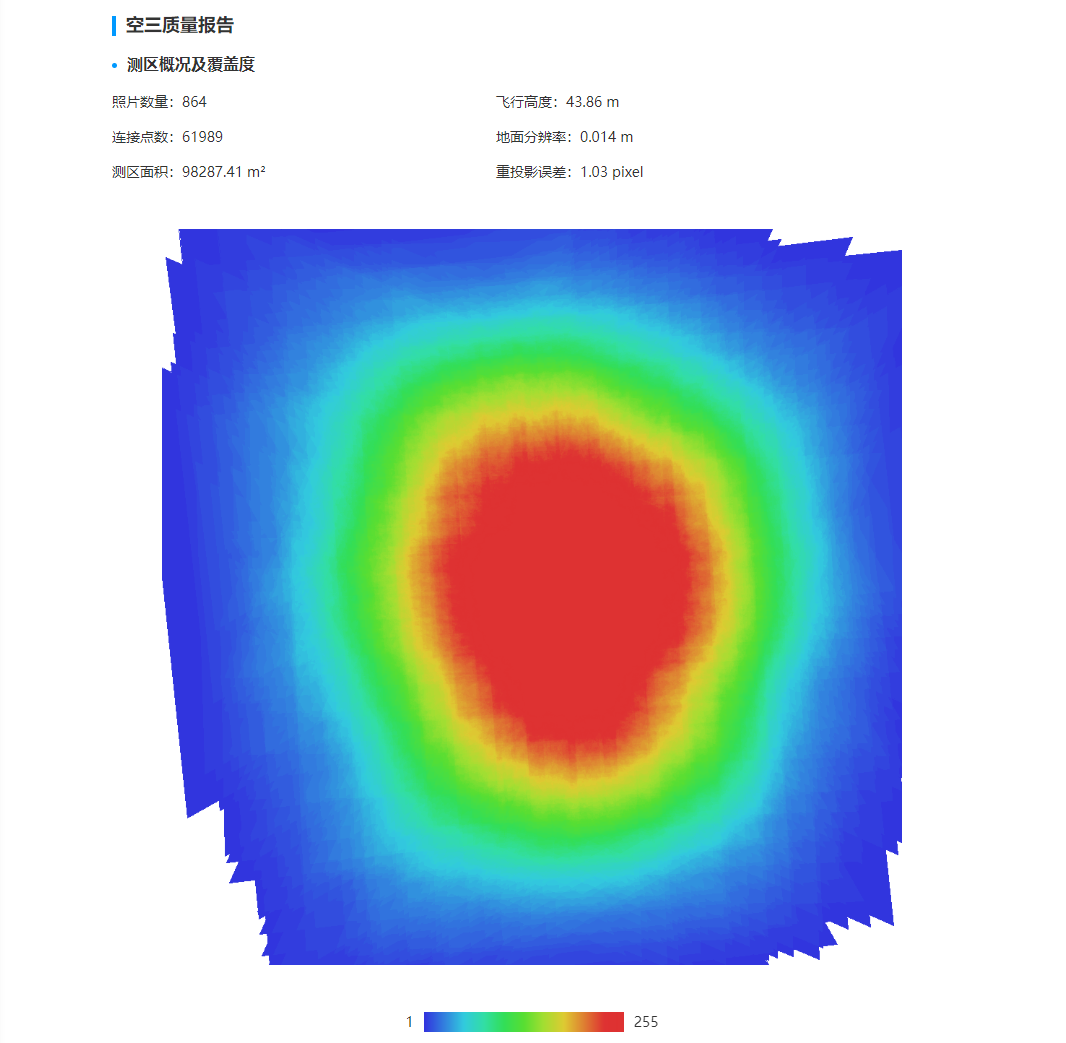
测区概况及覆盖度
记录照片数量、飞行高度、连接点数量、地面分辨率、测区面积、重投影误差。
重投影误差越小,相机位姿越准确,空三精度和成果质量越好。一般在1pixel左右,大于2建议检查数据导入是否有误。
附图为重叠覆盖分布图缩略图
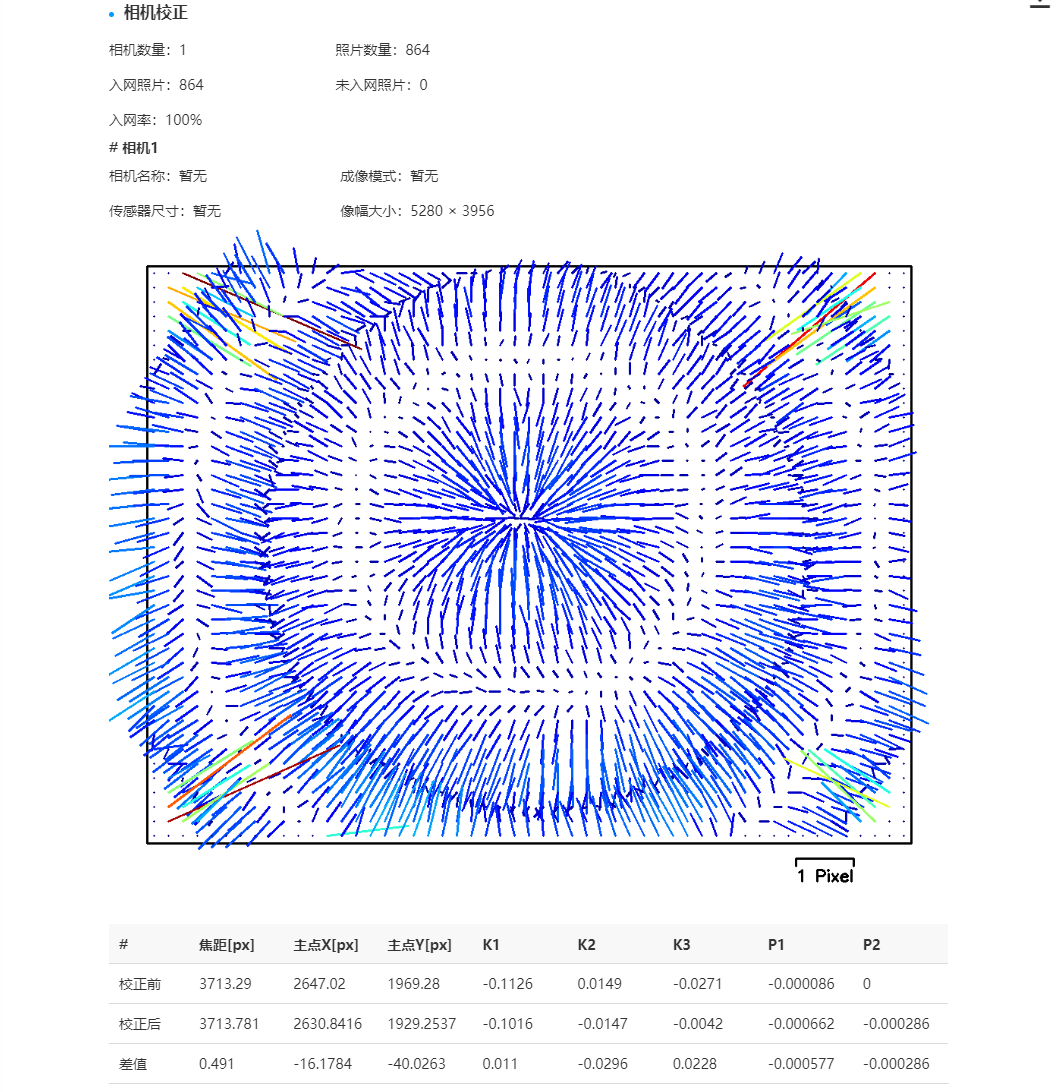
相机校正
记录相机数量、照片数量、入网照片、未入网照片、入网率、各相机畸变参数校正数据表。
未入网照片指空三时未解算出相机位姿的照片。未入网照片越多,入网率越低,会导致成果有缺漏。
附图为相机残差分布图
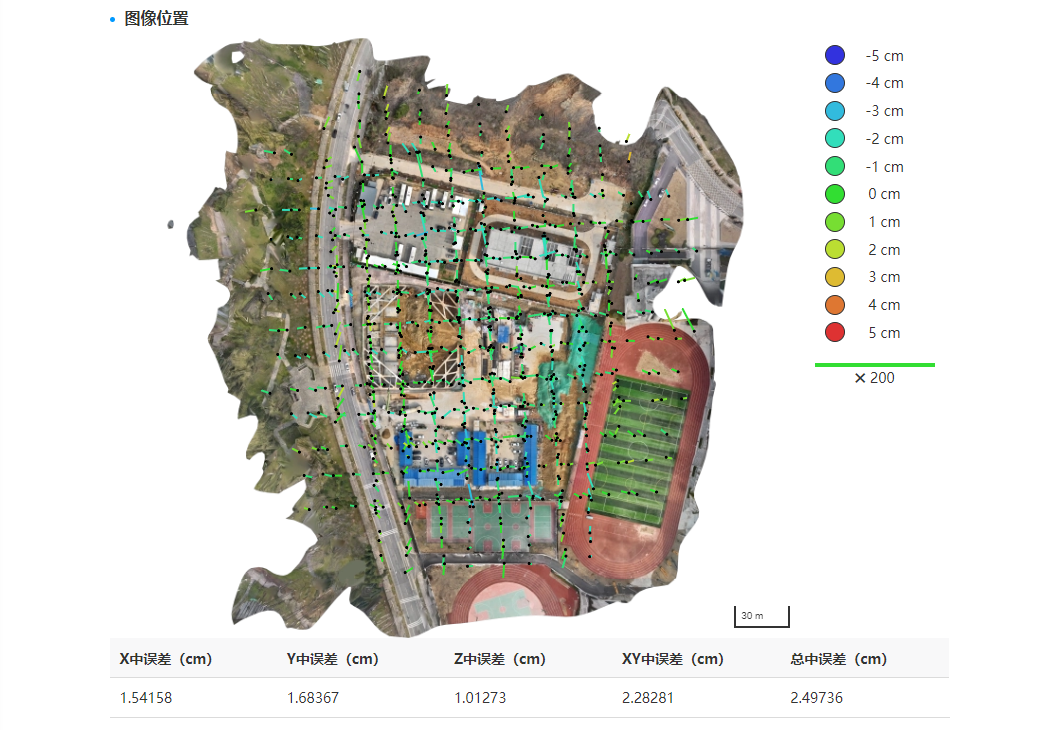
图像位置
记录空三解算后的照片位置与原始pos提供的照片位置的中误差。
该误差只反映图像位置与pos位置的差值,不代表实际精度。
附图为图像位置误差分布图
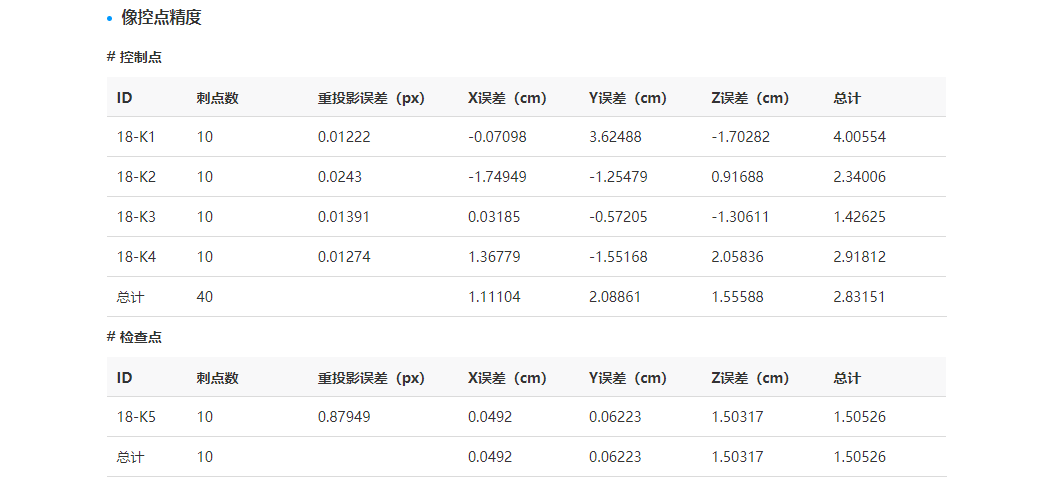
像控点精度
记录控制点与检查点误差表,总计为中误差。
控制点用于空三绝对定向,误差越小精度越高。检查点用于验证空三精度,误差越小精度越高。
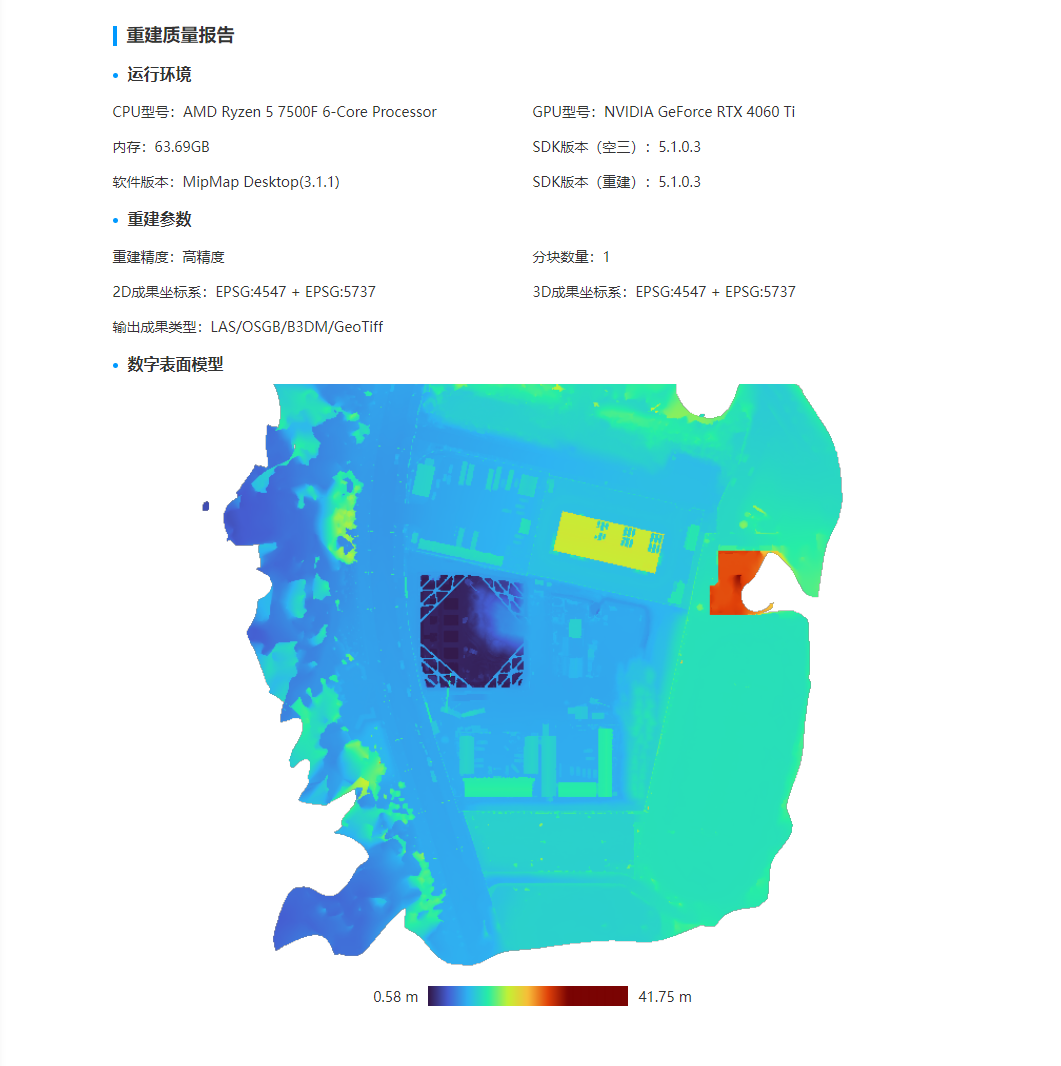
重建质量报告
运行环境:记录硬件设备的CPU、GPU、内存;软件版本和SDK版本。
重建参数:记录重建精度、分块数量、2D与3D成果坐标系、输出成果类型
附图为DSM数字表面模型
标注报告
任务概览
记录任务名称、任务类型、数据采集时间、重建完成时间。
附图为任务缩略图。

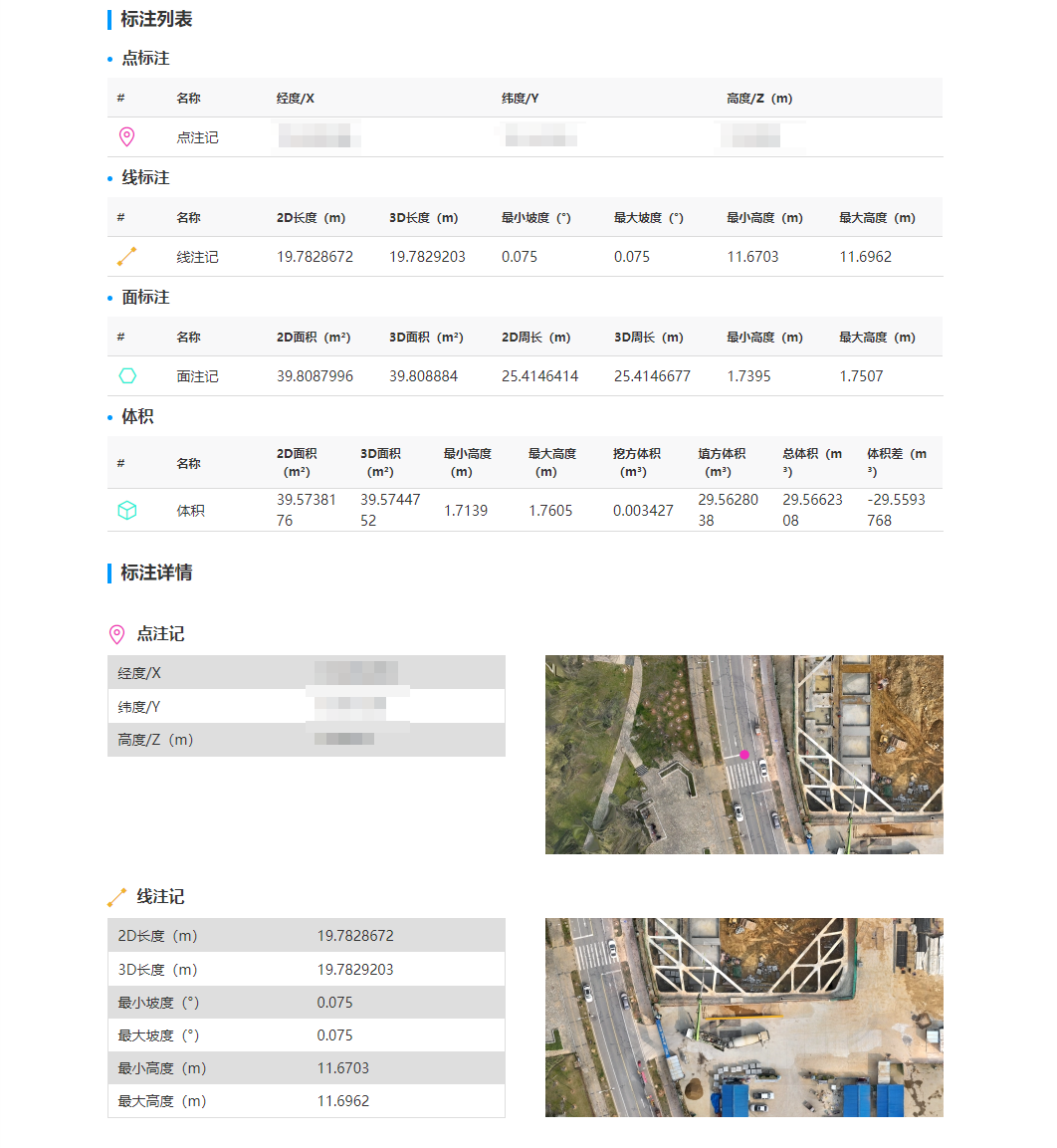
标注列表、标注详情
标注列表为所有标注信息总表;标注详情拆分每个标注的详细信息,右侧附带缩略图。