Before starting LiDAR data reconstruction, it is recommended to organize the required datasets in advance to ensure a smooth reconstruction workflow.
Required Data (General)
- LiDAR point cloud files (supported formats: .las, .laz)
- Trajectory files (supported formats: .csv, .text, .txt)
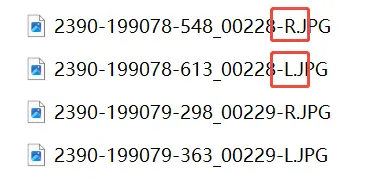
- Image data (supported formats: .jpg, .jpeg, .tif, .tiff, .webp)
- Image POS data (supported formats: .csv, .text, .txt)
- Camera parameters (LiDAR datasets typically use fisheye cameras). Required parameters include: focal length, principal point (X, Y), K1, K2, K3, K4
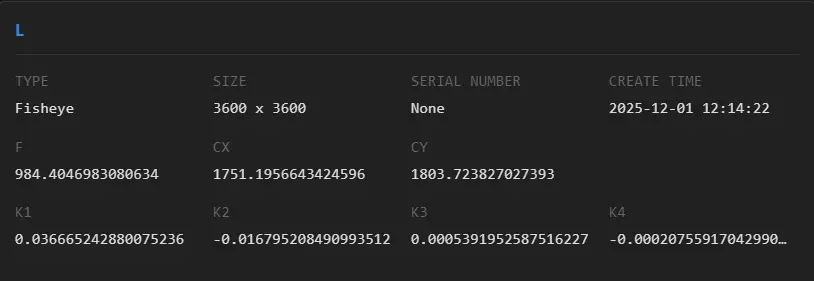
Image Data Organization
Fisheye images captured by LiDAR systems need to be grouped by camera. Image data can be organized into separate folders according to each camera in advance.