3.2 任务创建页
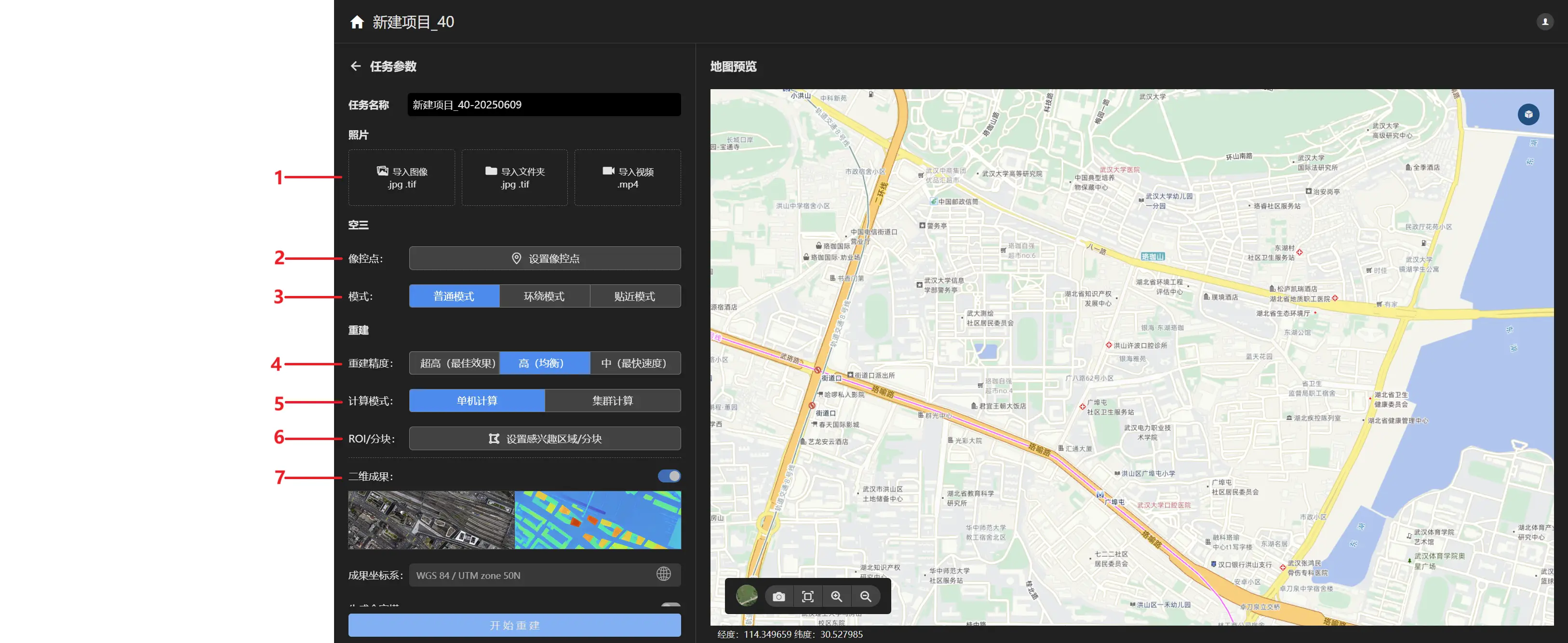
- 导入数据面板 输入影像(JPG/TIF)与POS数据,支持按图像和按文件夹两种方式的影像输入操作,支持影像POS自动读取和外部POS手动两种POS导入方式,支持相机合并、删除与参数编辑操作。 输入视频(MP4/WMV/AVI/MOV/MPG)数据,通过对视频抽帧得到影像数据进行重建,支持设置开始及结束时间和时间间隔,支持读取视频分辨率并预测抽帧后照片数量。
- 设置像控点按钮 点击按钮进入像控点设置页面,可以设置像控点并进行像控点刺点以提高空三精度。详细信息请参考设置像控点。
- 设置空三模式 点击选择空三模式,包括普通模式、环绕模式和贴近模式三种模式。支持根据影像数据采集方式选择对应空三模式,普通模式对应无人机正射、倾斜等大多数采集方式,环绕模式对应环绕目标采集方式,贴近模式对应贴近目标采集方式。
- 重建精度设置面板 点击选择重建精度,有高(最佳效果)、中(均衡)、低(最快速度)三种重建精度。高、中、低重建精度的区别在于与原始影像的重采样分辨率:高与原始影像具有相同分辨率,中为原始影像按2倍间隔重采样(即长和宽均为原始影像的 1/2), 低为原始影像按4倍间隔重采样(即长和宽均为原始影像的 1/4)。例如:原始影像的长×宽为6000×4000,高精度重建的影像长×宽为6000×4000,中精度重建的影像长×宽为3000×2000,低精度重建的影像长×宽为1500×1000。
- 计算模式设置面板 可以选择计算模式为单机计算还是集群计算,软件默认为单机计算,如果需要使用"集群计算",请确认激活了集群功能的License,并配置好了计算集群。详细信息请参考[集群计算]。
- 感兴趣区域和自定义分块设置面板 点击按钮,可进入感兴趣区域/分块设置页面,支持外部KML文件导入以及手动多边形区域绘制,这两种感兴趣区域设置方式。详细信息请参考第四节中的感兴趣区域和自定义分块相关设置。
- 二维成果控制面板
点击二维重建控制按钮,保持打开状态
 ,项目重建时可输出二维成果(GeoTiff格式的数字正射影像与数字表面模型)。目前不支持在无POS或控制点约束情况下生成正射影像。
点击成果坐标系按钮
,项目重建时可输出二维成果(GeoTiff格式的数字正射影像与数字表面模型)。目前不支持在无POS或控制点约束情况下生成正射影像。
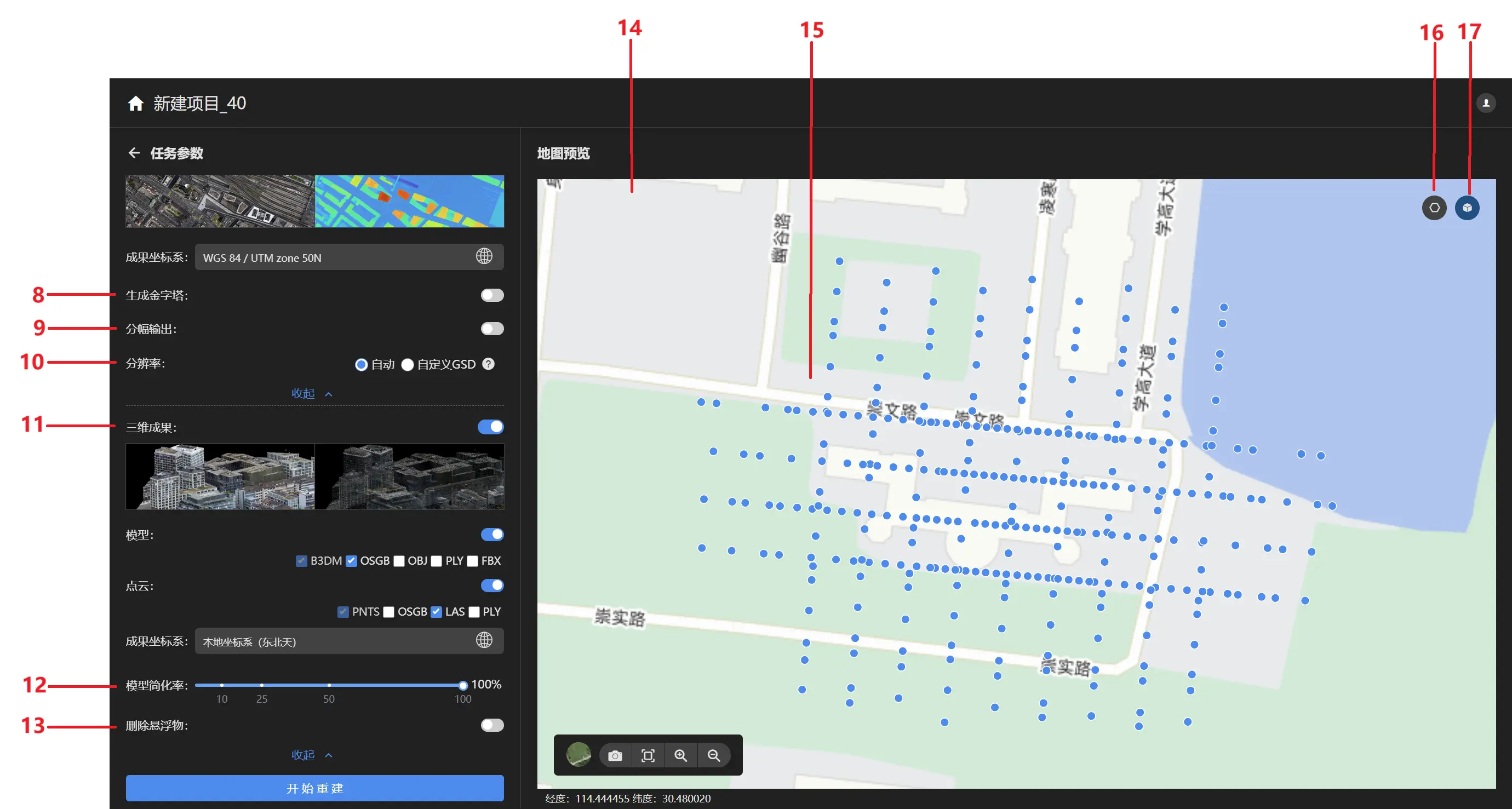
点击成果坐标系按钮 ,进入坐标系选择页面,可设置二维成果坐标系,包括地理坐标系、地心坐标系、投影坐标系及本地坐标系等。
坐标系选择页面可以选择高程系,目前支持大地高、1985国家高程基准和自定义高程系,自定义高程系通过导入tif格式高程异常文件添加。
,进入坐标系选择页面,可设置二维成果坐标系,包括地理坐标系、地心坐标系、投影坐标系及本地坐标系等。
坐标系选择页面可以选择高程系,目前支持大地高、1985国家高程基准和自定义高程系,自定义高程系通过导入tif格式高程异常文件添加。 - 生成金字塔
在二维成果控制面板中点击更多设置,可以更详细的设置二维成果格式,点击生成金字塔按钮,保持打开状态,重建完成后正射影像(包括分幅正射影像)成果包括金字塔文件。
- 分幅输出
点击分幅输出按钮,保持打开状态,重建完成后2D成果文件夹包括分幅正射影像,支持设置分幅影像最大边长(单位为像素),默认最大边长为5000像素。
- 二维成果分辨率设置 二维成果分辨率默认根据重建精度、照片GSD等因素自动计算,也可以自定义GSD,实际GSD受照片GSD限制,当设置分辨率过高时,像素数量和有效分辨率都不会增加。
- 三维成果控制面板
击三维重建控制按钮,保持打开状态,项目重建时可输出三维成果(包括LAS、 OSGB等格式的三维点云以及OSGB、OBJ、PLY、3Dtile等格式的三维模型成果)。
点击成果坐标系按钮,进入坐标系选择页面,可设置三维成果坐标系,包括地理坐标系、地心坐标系、投影坐标系及本地坐标系等。
坐标系选择页面可以选择高程系,目前支持大地高、1985国家高程基准和自定义高程系,自定义高程系通过导入tif格式高程异常文件添加。
- 模型简化率 根据设置的模型简化率,简化网格模型,默认简化率为100%生成完整模型。
- 删除悬浮物 开启后会删除模型周边未连接的悬浮物。
- 地图展示面板
展示影像GPS排列或重建成果。
左下方包含以下工具集:
 :切换底图,点击可将底图切换至卫星地图或标准地图模式。
:切换底图,点击可将底图切换至卫星地图或标准地图模式。
 :地图快照,点击可进行截图输出。
:地图快照,点击可进行截图输出。
 :地图复位,点击可以将地图回复至影像GPS位置。
:地图复位,点击可以将地图回复至影像GPS位置。
 :地图放大,点击可流畅放大地图。
:地图放大,点击可流畅放大地图。
 :地图缩小,点击可流畅缩小地图。
:地图缩小,点击可流畅缩小地图。 - 相机位置 添加带有相机位置的照片或添加照片后导入POS信息后,会在地图上显示相机位置。
- 照片删除
点击地图展示面板右上方的区域删除按钮
 ,可以删除绘制区域内或外的照片
,可以删除绘制区域内或外的照片 - 感兴趣区域
点击地图展示面板的右上方的感兴趣区域显示按钮
 ,可选择/取消展示对象重建区域。
,可选择/取消展示对象重建区域。