4.2.3 Importer le nuage de points et la trajectoire
Importer le nuage de points LiDAR
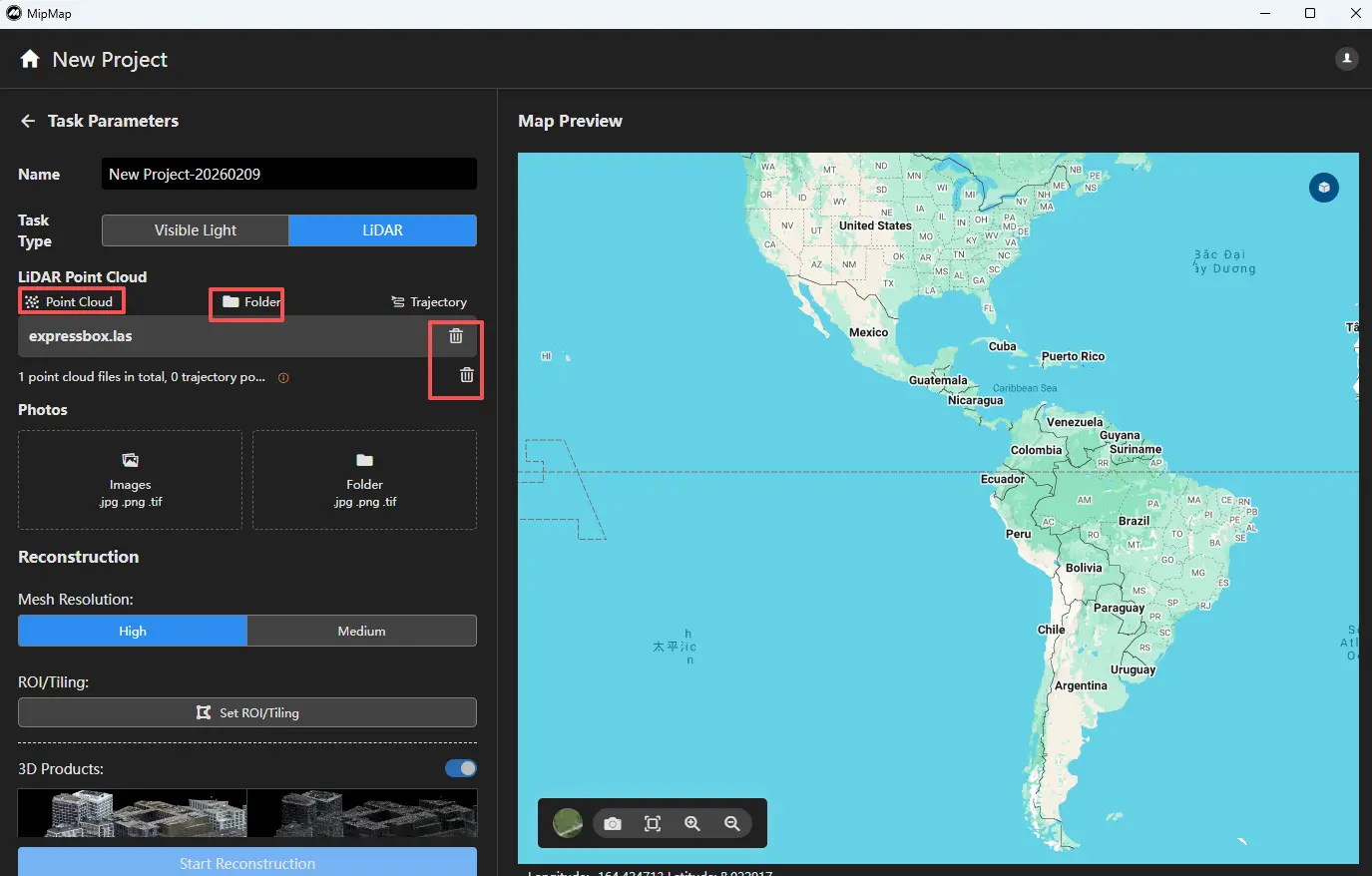
Dans le panneau des paramètres de tâche à gauche, vous pouvez importer le nuage de points LiDAR par fichier ou par dossier.
- La fonction Importer un nuage de points permet de sélectionner individuellement les fichiers de nuage de points à l’intérieur d’un dossier qui participeront à la reconstruction.
- La fonction Importer un dossier importera toutes les données de nuage de points du dossier sélectionné (y compris les sous-dossiers) dans la tâche.

Après l’importation du nuage de points, vous pouvez cliquer sur les fonctions situées au-dessus de la liste pour continuer l’importation. Vous pouvez également cliquer sur l’icône de suppression à droite pour supprimer un nuage de points.
Importer la trajectoire
Après avoir importé le nuage de points, cliquez sur la fonction Trajectoire au-dessus de la liste pour importer les données de trajectoire.

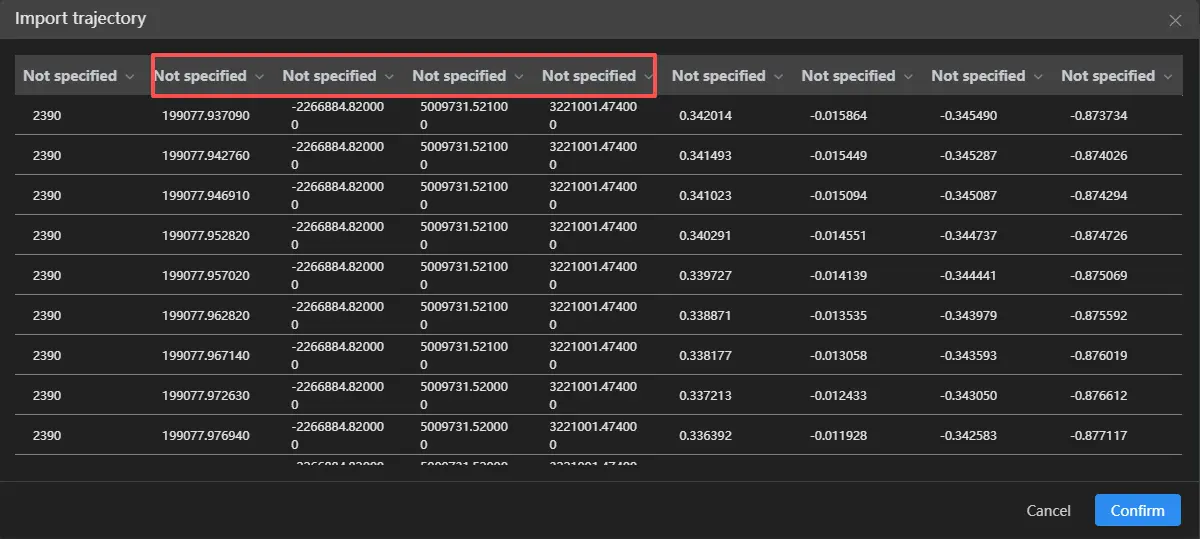
Cliquez sur Importer un fichier de trajectoire ![]() , sélectionnez le fichier correspondant et assignez les colonnes de timestamp, X, Y et Z. Une fois la configuration terminée, cliquez sur Confirmer.
, sélectionnez le fichier correspondant et assignez les colonnes de timestamp, X, Y et Z. Une fois la configuration terminée, cliquez sur Confirmer.
Ensuite, définissez le système de coordonnées des données de trajectoire  .
.
Remarque : Le timestamp et le système de coordonnées de la trajectoire doivent être identiques à ceux du nuage de points.

Après avoir terminé la configuration, cliquez sur Confirmer. Si les paramètres sont corrects, un aperçu s’affichera sur la carte.
