4.2.3 点群および軌跡のインポート
LiDAR点群のインポート
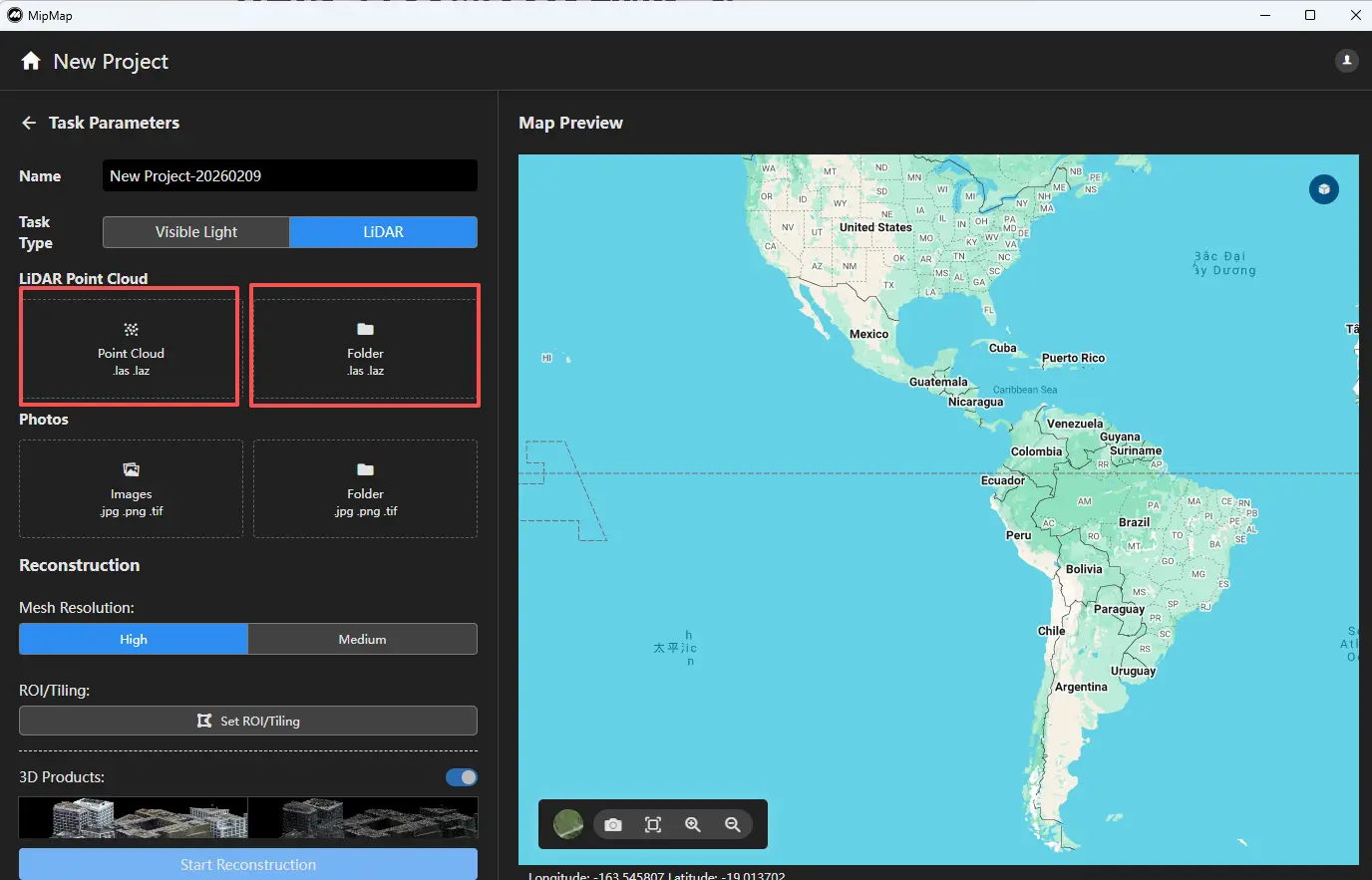
左側のタスクパラメータで、LiDAR点群をファイルまたはフォルダ単位でインポートできます。
- 点群をインポート機能では、フォルダ内から再構築に使用する点群データを個別に選択できます。
- フォルダをインポート機能では、選択したフォルダ(サブフォルダを含む)内のすべての点群データがタスクにインポートされます。
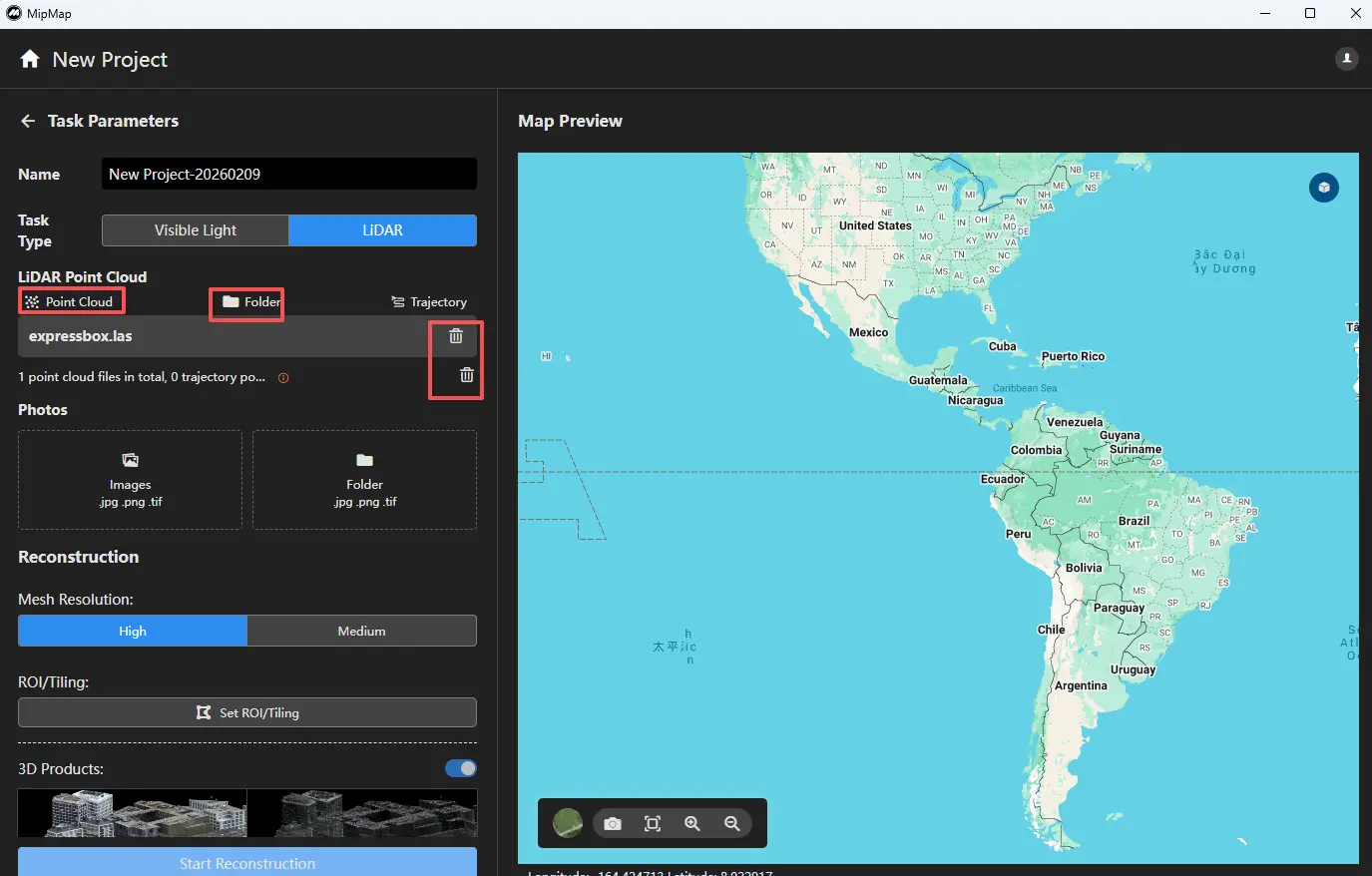
点群をインポートした後、点群リスト上部の機能をクリックして追加のデータをインポートできます。また、右側の削除アイコンをクリックして点群を削除することもできます。
軌跡のインポート
点群をインポートした後、点群リスト上部の軌跡機能をクリックして軌跡データをインポートします。

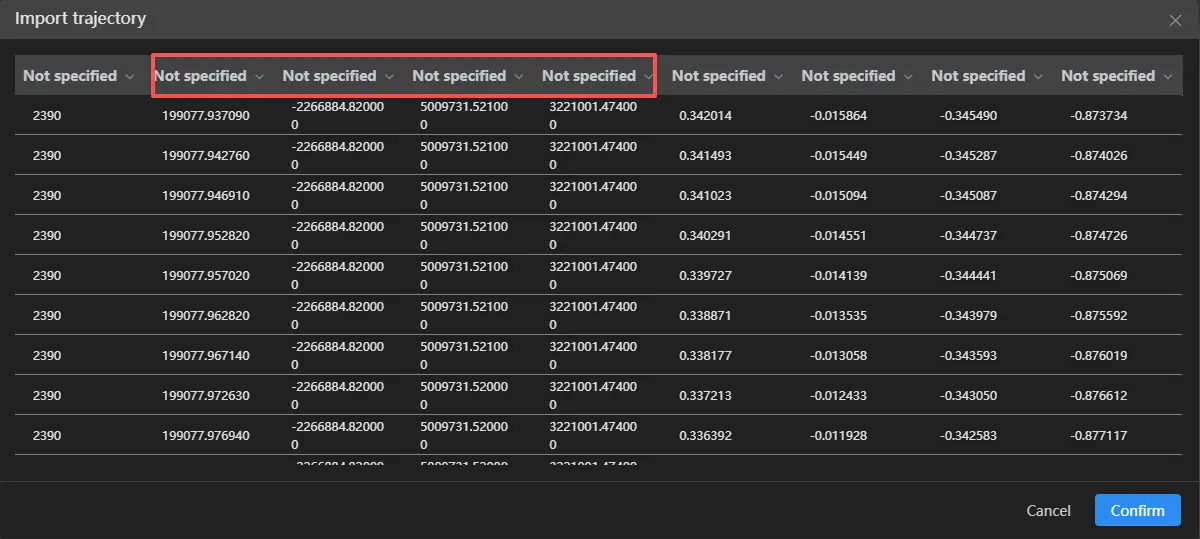
軌跡ファイルをインポート ![]() をクリックし、該当する軌跡ファイルを選択します。タイムスタンプ、X、Y、Zの各列を指定し、設定後に確定をクリックします。
をクリックし、該当する軌跡ファイルを選択します。タイムスタンプ、X、Y、Zの各列を指定し、設定後に確定をクリックします。
次に、軌跡データの座標系を設定します  。
。
注意: 軌跡のタイムスタンプおよび座標系は点群データと一致している必要があります。

設定完了後、確定をクリックします。正しく設定されている場合、マップ上にプレビューが表示されます。
