4.2.4 写真およびPOSのインポート
写真のインポート
左側のタスクパラメータで、写真データをファイルまたはフォルダ単位でインポートできます。
- 画像をインポート機能では、フォルダ内から再構築に使用する写真データを個別に選択できます。
- フォルダをインポート機能では、選択したフォルダ(サブフォルダを含む)内のすべての写真データがタスクにインポートされます。
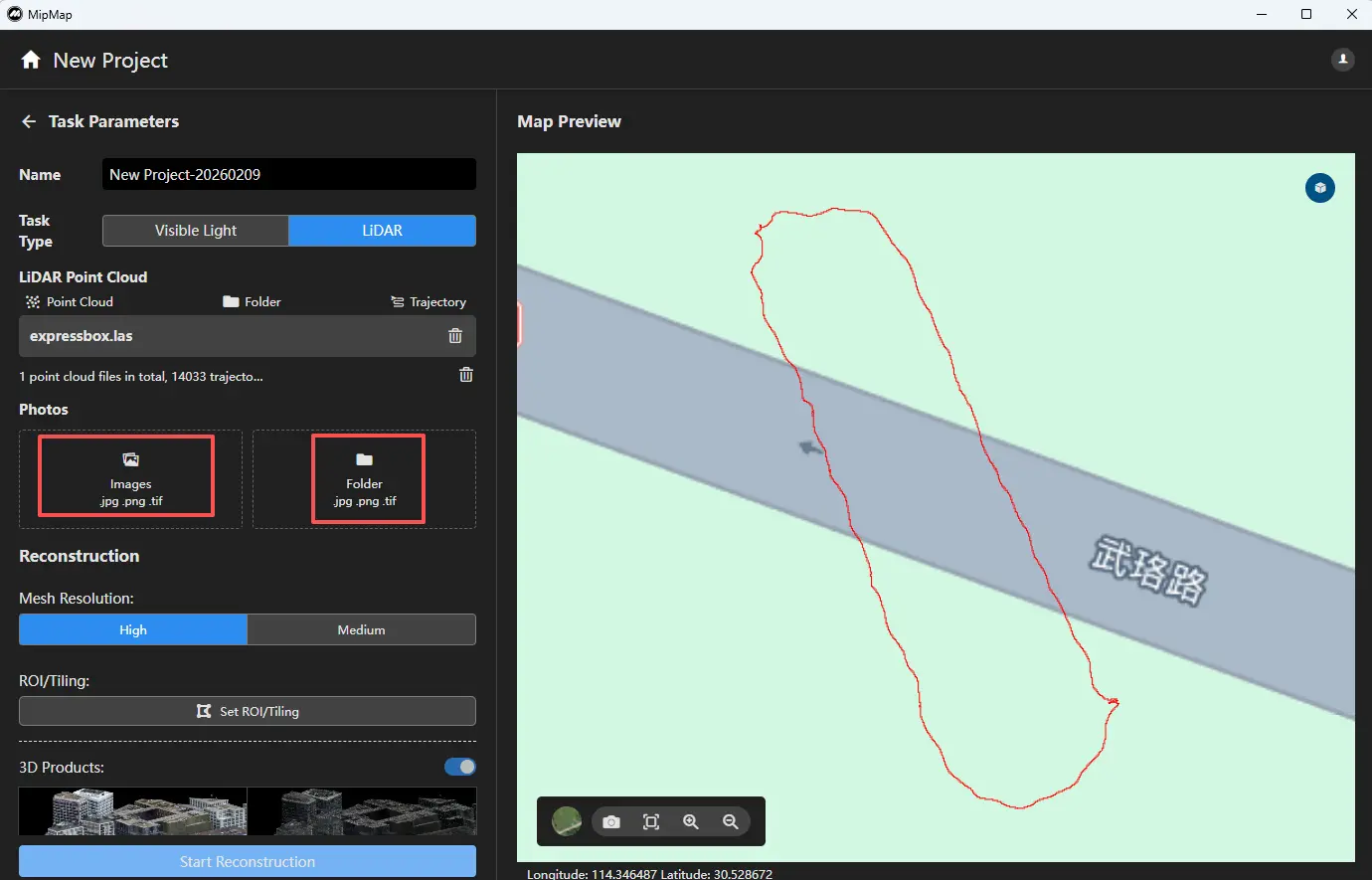
写真情報に位置情報が含まれている場合、ソフトウェアが自動的に読み取ります。
注意: LiDARの魚眼写真はカメラごとに区別し、対応するカメラごとにインポートする必要があります。
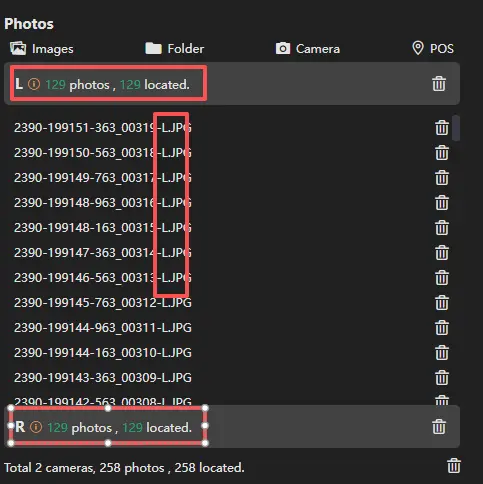
写真をインポートした後、写真リスト上部の機能をクリックして追加のデータをインポートできます。また、右側の削除アイコンをクリックしてカメラ写真を削除することもできます。

POSのインポート
写真リスト上部のPOS機能をクリックすると、POSインターフェースが表示されます。LiDARデータの場合は、通常POSファイル内の座標や姿勢情報をインポートして利用することが推奨されます。

POSファイルをインポート ![]() をクリックし、該当するPOSファイルを選択します。使用する姿勢角の種類を設定し、名称、XYZ、姿勢角などの列を指定します。設定完了後、確定をクリックします。
をクリックし、該当するPOSファイルを選択します。使用する姿勢角の種類を設定し、名称、XYZ、姿勢角などの列を指定します。設定完了後、確定をクリックします。

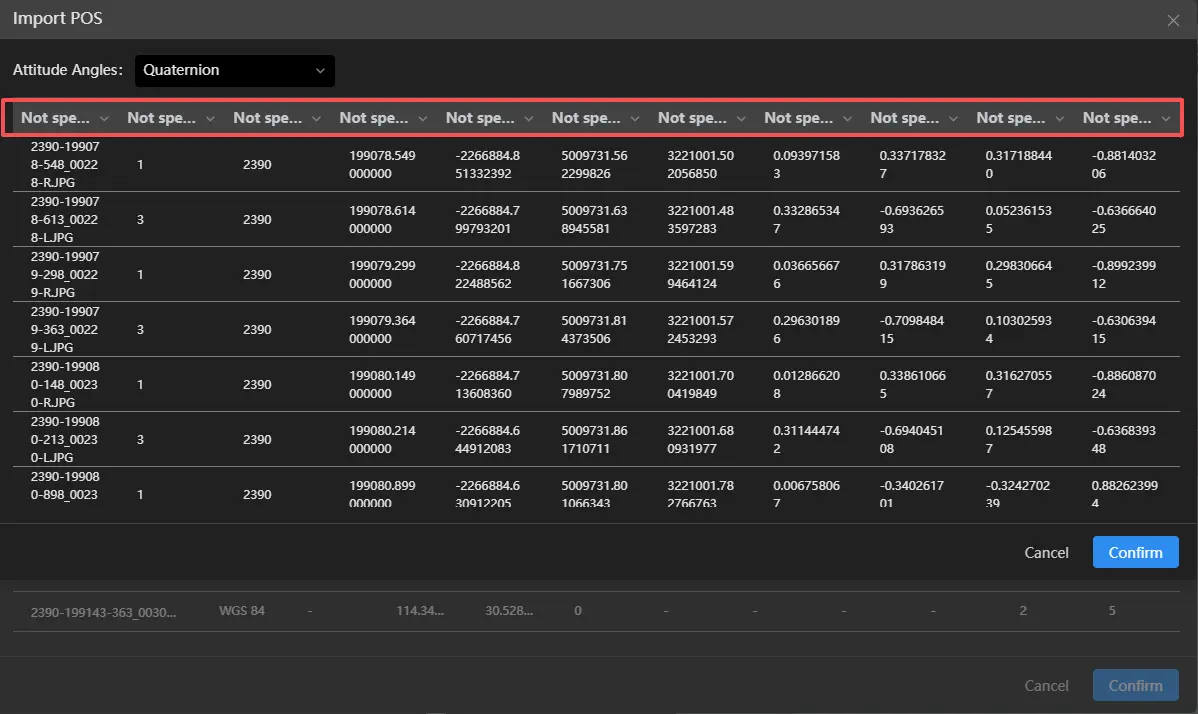
次に、POSデータの座標系を設定します  。
。

座標の精度については、LiDARのPOSデータをインポートする際は通常「高精度」がデフォルトになっています。

設定完了後、確定をクリックします。誤りや不要なデータがある場合は、領域削除機能(左クリックで範囲を描画し、ダブルクリックで終了)を使用して該当するPOSおよび写真を削除できます。
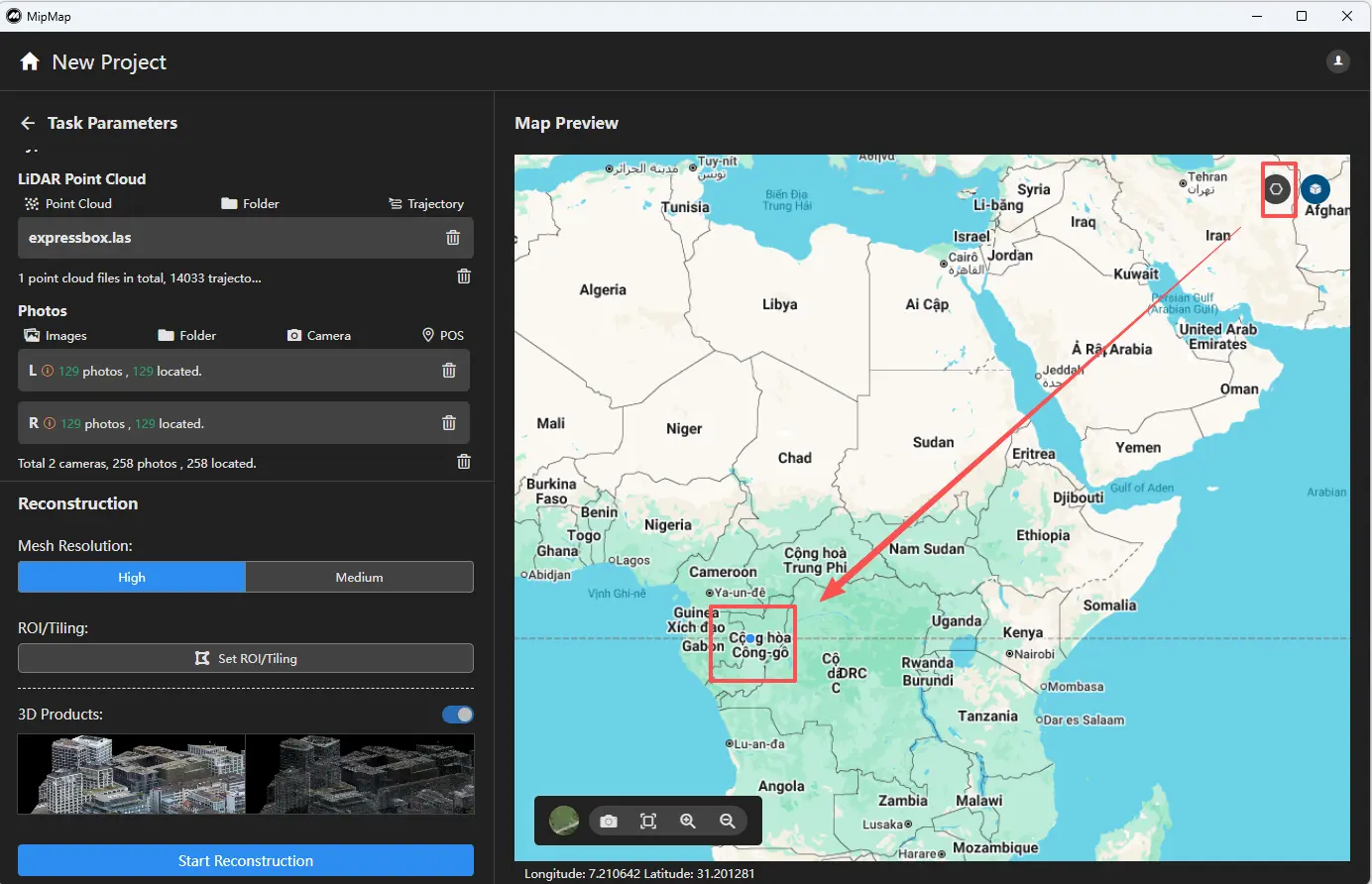
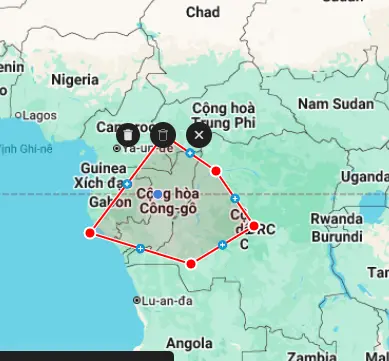
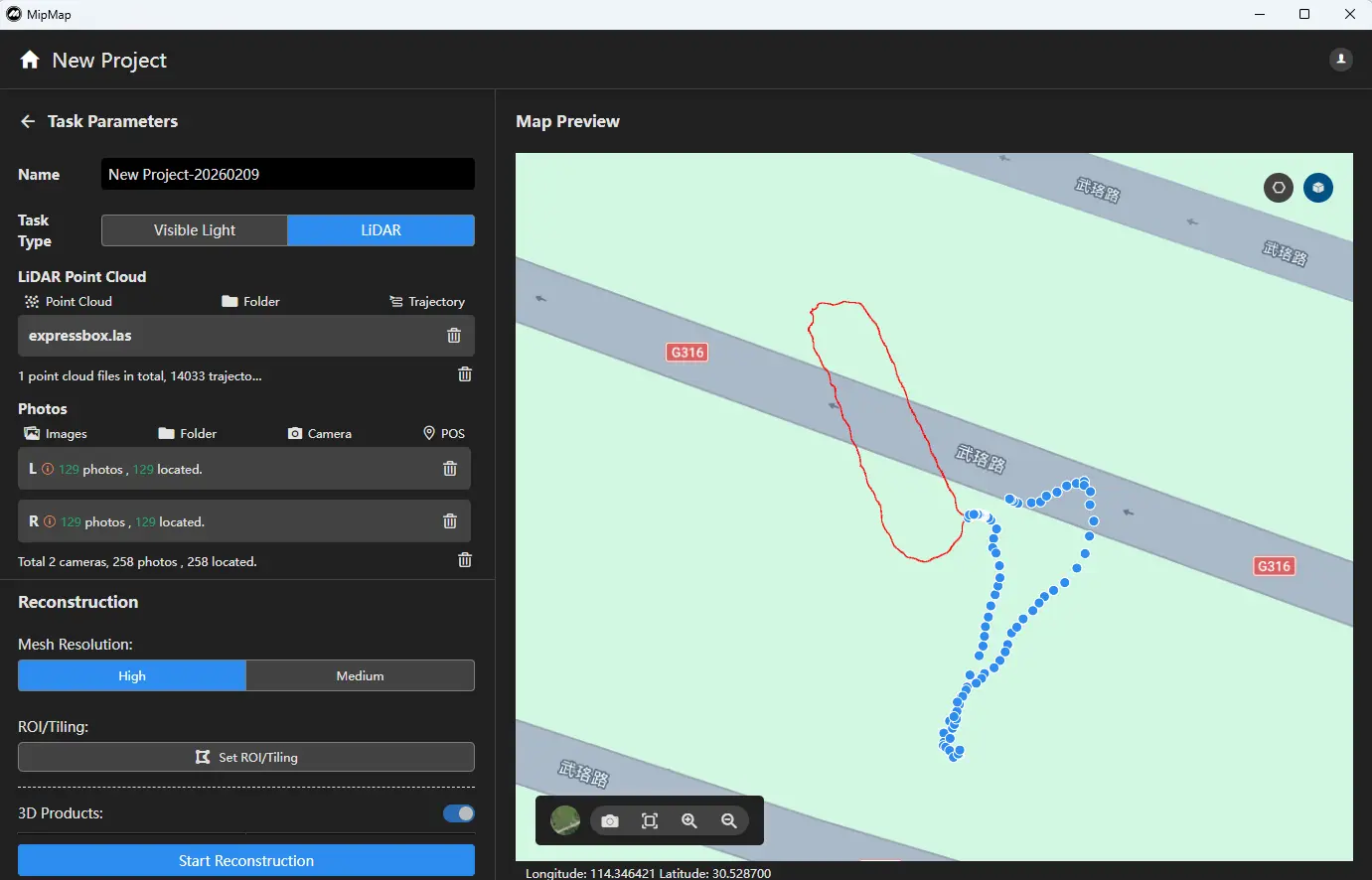
正しく設定されている場合、インポート後にマップ上でプレビュー結果が表示されます。
