4.2.1 データ準備
LiDAR データの再構築を開始する前に、再構築に必要なデータを事前に整理しておくことで、その後の処理を円滑に進めることができます。
一般的に必要なデータ
- LiDAR 点群ファイル(対応形式:.las、.laz)
- 軌跡ファイル(対応形式:.csv、.text、.txt)
- 写真データ(対応形式:.jpg、.jpeg、.tif、.tiff、.png)
- 写真 POS データ(対応形式:.csv、.text、.txt)
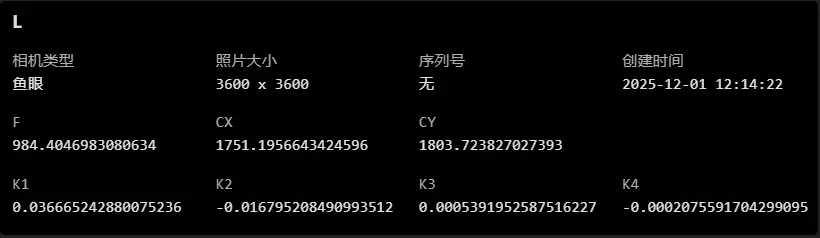
- カメラパラメータ(LiDAR データでは通常、魚眼カメラを使用):必要なパラメータは以下の通りです。
焦点距離、主点 XY、K1、K2、K3、K4
歪み補正済み(undistorted)画像を使用する場合は、焦点距離と主点 XY のみが必要です。
一般的には、より広い視野角を確保できるため、魚眼写真データの使用を優先することを推奨します。
写真データの整理
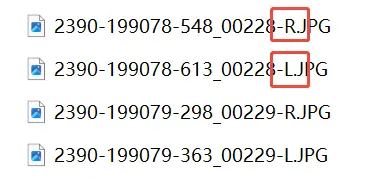
LiDAR の魚眼写真はカメラごとに区別する必要があります。写真データは、各カメラごとにフォルダを分けて事前に整理しておくことができます。

注意事項
- 軌跡および POS の座標系は、実際のデータの座標値と一致するよう正しく設定する必要があります。
- 軌跡のタイムスタンプおよび座標系は、点群データと必ず一致させてください。
- POS データには、写真と対応付けるための写真名の列が必要であり、使用する姿勢角を設定する必要があります。複数の姿勢パラメータがある場合は、一般的にクォータニオンの使用を推奨します。
(歪み補正画像を使用する場合、姿勢角は「なし」を選択し、対応する姿勢角パラメータ列は設定不要です。) - 写真はカメラごとにすべてインポートする必要があります。同一フォルダ内にある場合は、事前にカメラ別フォルダへ整理してからインポートすることを推奨します。