4.2.4 Fotos und POS importieren
Fotos importieren
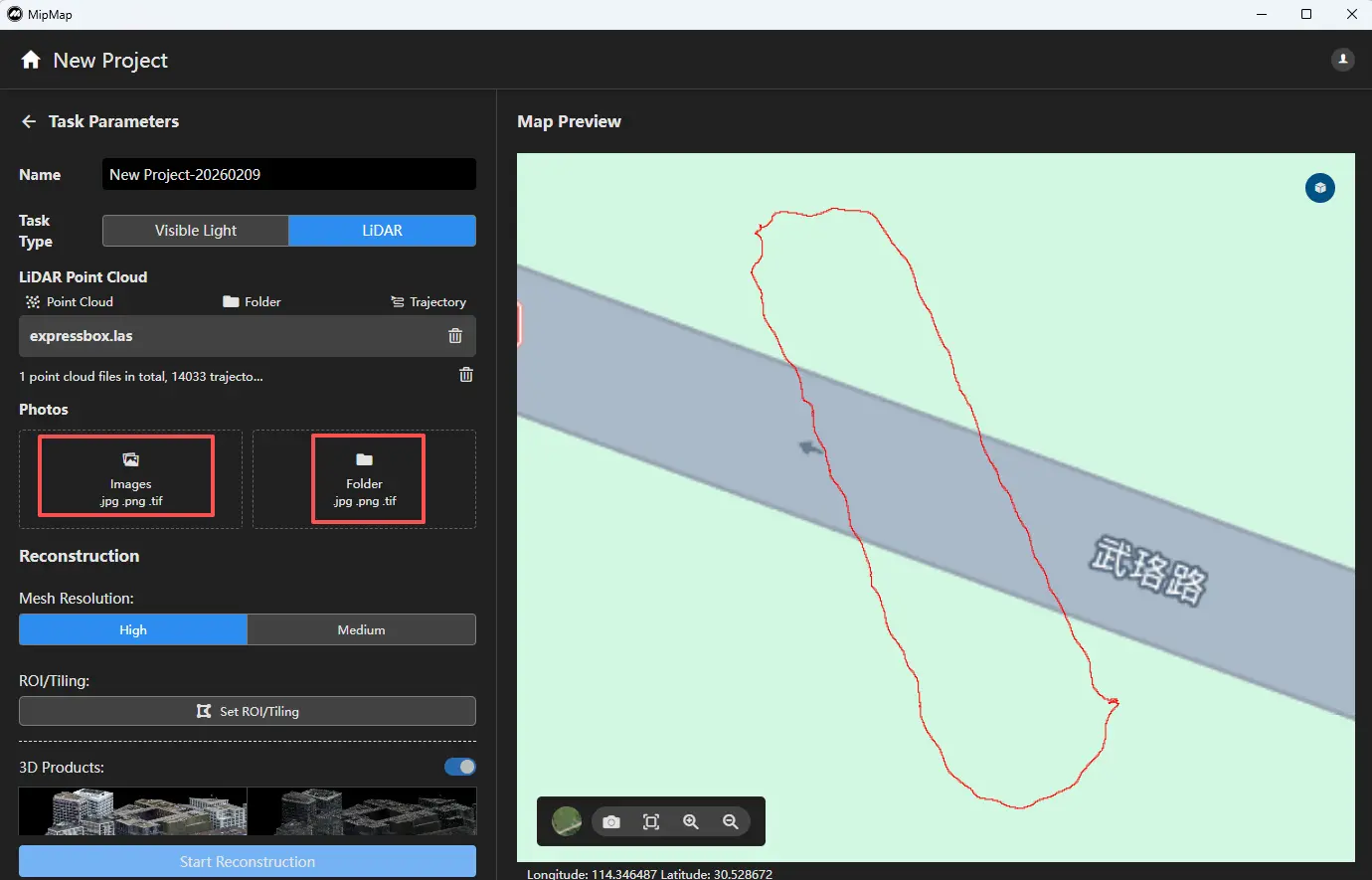
Im linken Bereich Aufgabenparameter können Bilddaten per Datei oder Ordner importiert werden.
- Mit der Funktion Bilder importieren können gezielt Fotos innerhalb eines Ordners ausgewählt werden, die an der Rekonstruktion teilnehmen sollen.
- Mit Ordner importieren werden alle Fotos im ausgewählten Ordner (einschließlich Unterordnern) in die Aufgabe übernommen.
Wenn die Fotoinformationen bereits Standortdaten enthalten, liest die Software diese automatisch aus.
Hinweis: Fisheye-Fotos aus LiDAR-Systemen müssen nach Kamera unterschieden und entsprechend der jeweiligen Kamera importiert werden.
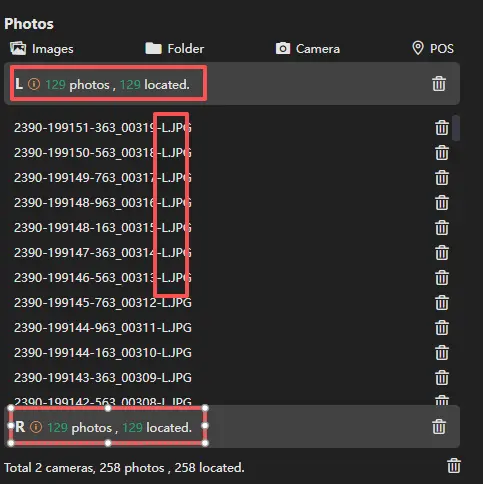
Nach dem Import können über die Funktionsleiste oberhalb der Fotoliste weitere Daten hinzugefügt werden. Über das Löschsymbol rechts neben den Bildern können Kamerafotos entfernt werden.

POS importieren
Über der Fotoliste können Sie auf die POS-Funktion klicken, um die POS-Oberfläche zu öffnen. Für LiDAR-Daten wird allgemein empfohlen, die Koordinaten und Lageinformationen aus der POS-Datei zu importieren und zu verwenden.

Klicken Sie auf POS-Datei importieren ![]() , wählen Sie die entsprechende POS-Datei aus, legen Sie den verwendeten Lagewinkeltyp fest und weisen Sie die Spalten für Name, XYZ-Koordinaten sowie Lagewinkel zu. Bestätigen Sie anschließend die Einstellungen.
, wählen Sie die entsprechende POS-Datei aus, legen Sie den verwendeten Lagewinkeltyp fest und weisen Sie die Spalten für Name, XYZ-Koordinaten sowie Lagewinkel zu. Bestätigen Sie anschließend die Einstellungen.

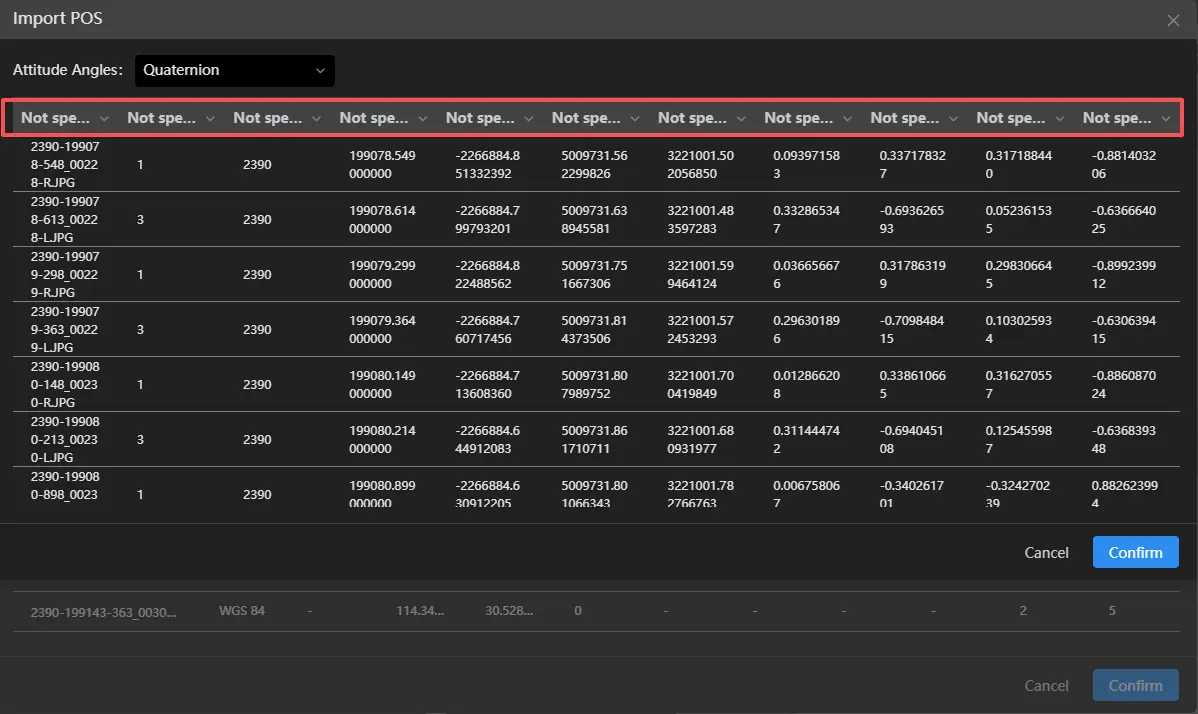
Anschließend legen Sie das Koordinatensystem für die POS-Daten fest  .
.

Für die Koordinatengenauigkeit wird beim Import von POS-Daten aus dem LiDAR-System in der Regel standardmäßig eine hohe Genauigkeit angenommen.

Nach Abschluss der Einstellungen klicken Sie auf Bestätigen. Falls Fehler oder nicht benötigte Daten vorhanden sind, können Sie die Funktion Bereich löschen verwenden (mit der linken Maustaste einen Bereich zeichnen, Doppelklick zum Beenden), um entsprechende POS-Daten und Fotos zu entfernen.
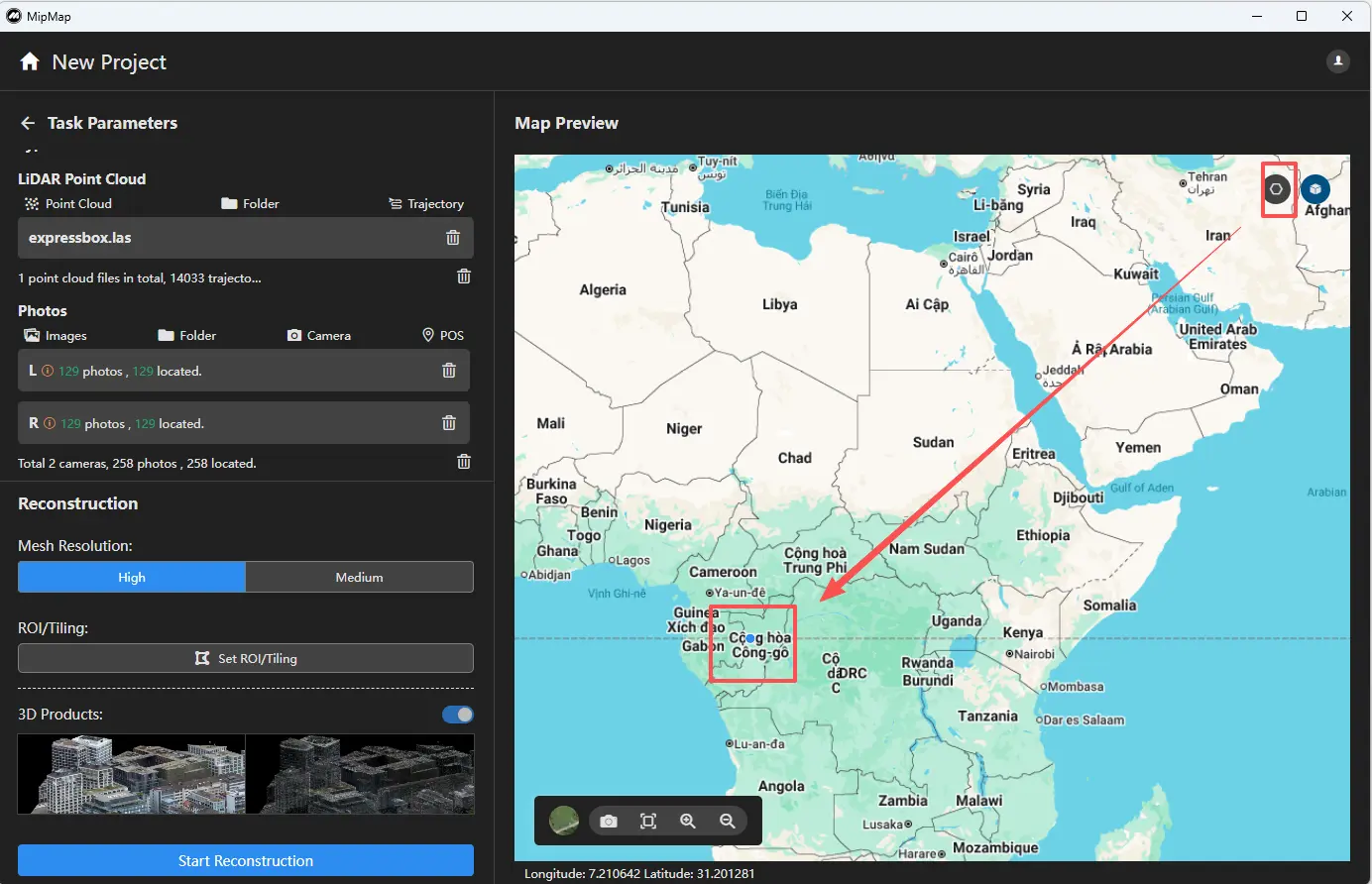
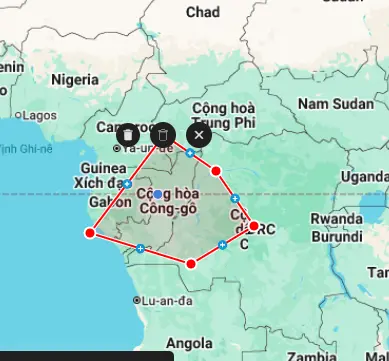
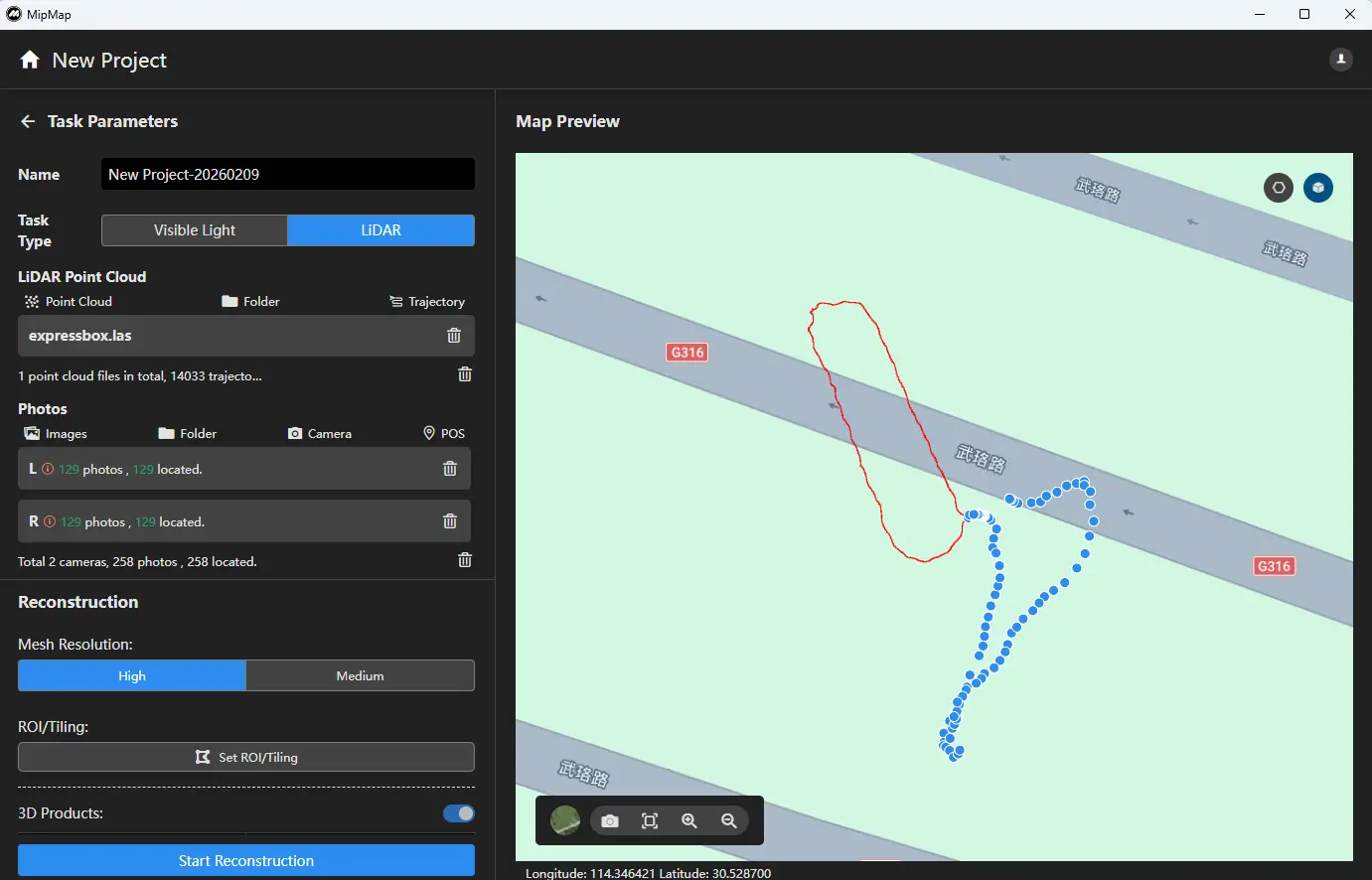
Bei korrekter Konfiguration wird nach dem Import eine Vorschau auf der Karte angezeigt.
