4.2.4 Importar fotos y POS
Importar fotos
En el panel de parámetros de la tarea a la izquierda, puedes importar datos de imágenes por archivo o por carpeta.
- La función Importar imágenes permite seleccionar fotos específicas dentro de una carpeta para participar en la reconstrucción.
- La función Importar carpeta importará todas las fotos dentro de la carpeta seleccionada (incluidas las subcarpetas) a la tarea.
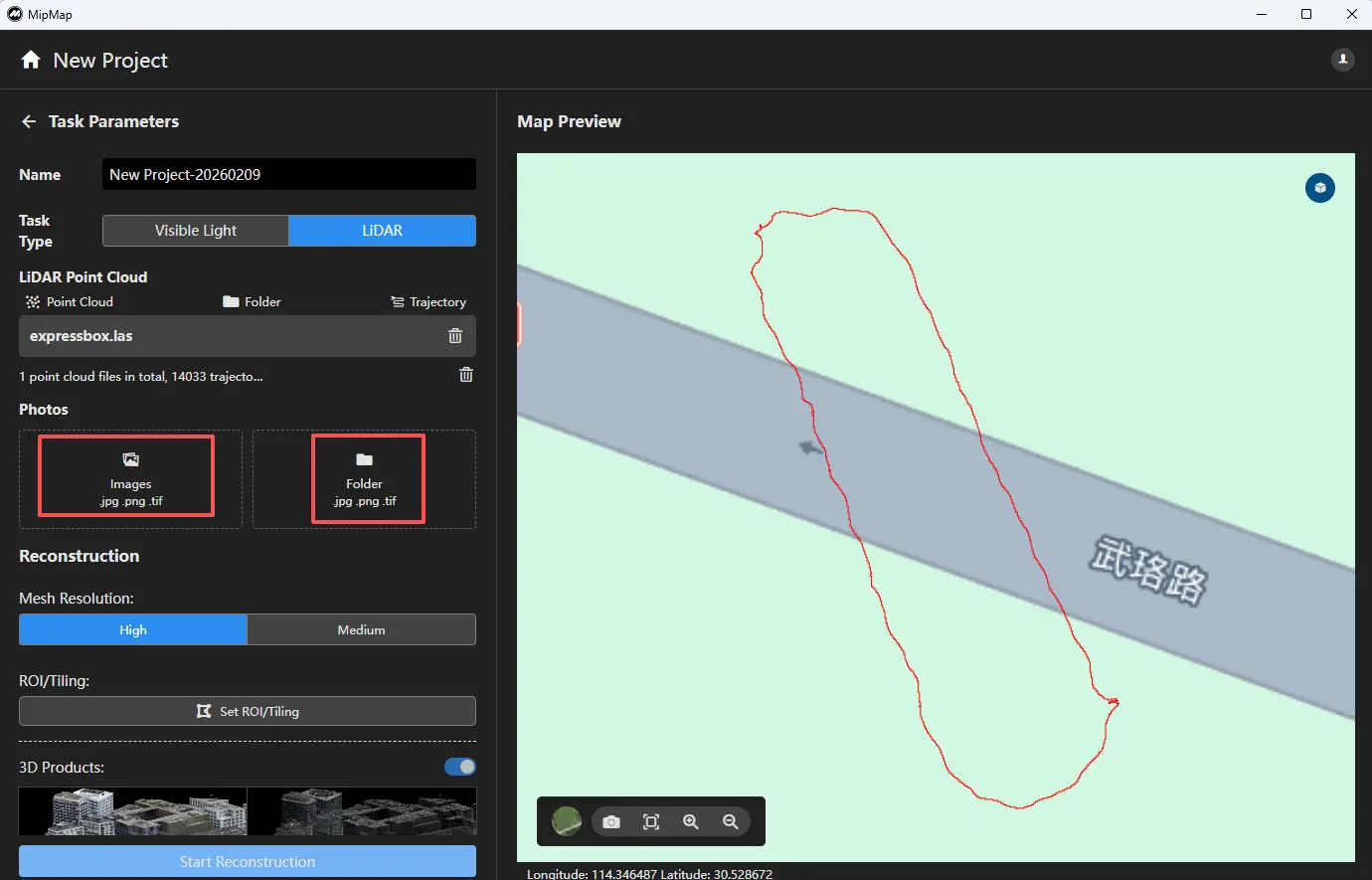
Si la información de la foto incluye datos de ubicación, el software los leerá automáticamente.
Nota: Las fotos ojo de pez del LiDAR deben distinguirse por cámara e importarse según la cámara correspondiente.
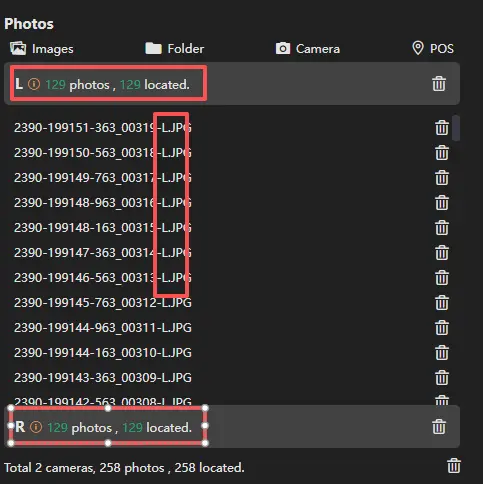
Después de importar las fotos, puedes usar las funciones situadas encima de la lista de imágenes para seguir importando. También puedes hacer clic en el icono de eliminación a la derecha para eliminar las fotos de la cámara.

Importar POS
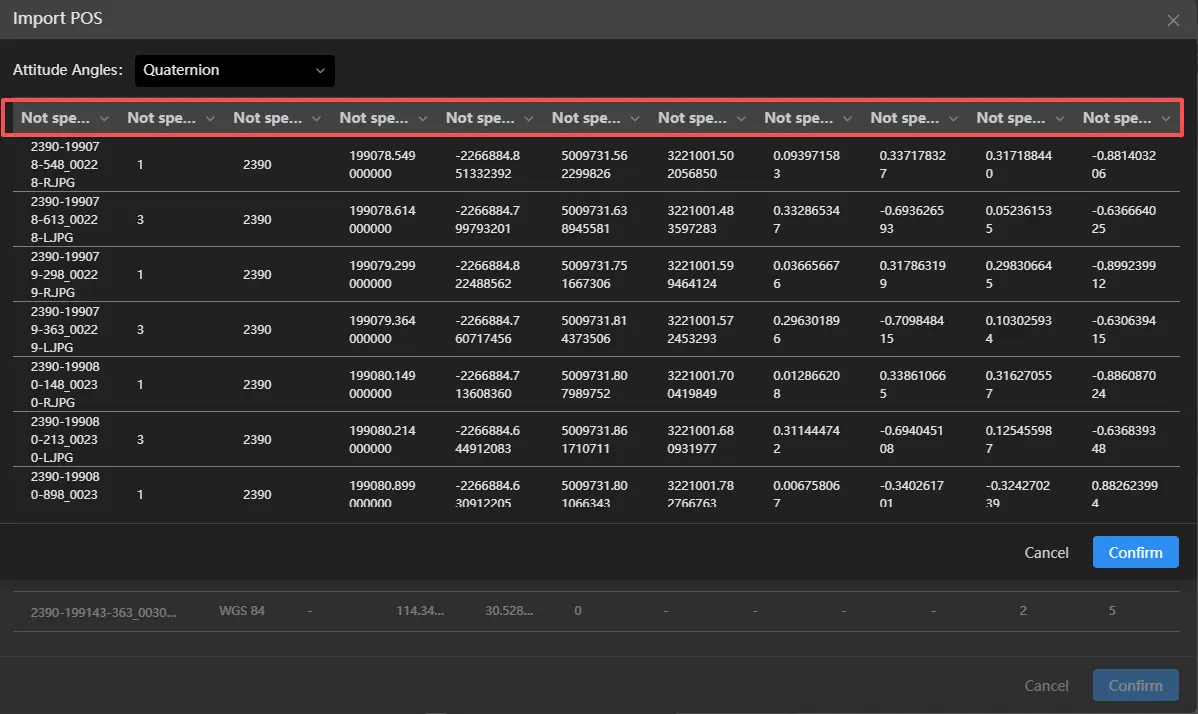
Puedes hacer clic en la función POS situada encima de las fotos para abrir la interfaz de POS. Para los datos de LiDAR, generalmente se recomienda importar y utilizar la información de coordenadas y actitud del archivo POS.

Haz clic en Importar archivo POS ![]() , selecciona el archivo correspondiente, define el tipo de ángulos de actitud utilizado y asigna las columnas de nombre, coordenadas XYZ y ángulos de actitud. Una vez configurado, haz clic en Confirmar.
, selecciona el archivo correspondiente, define el tipo de ángulos de actitud utilizado y asigna las columnas de nombre, coordenadas XYZ y ángulos de actitud. Una vez configurado, haz clic en Confirmar.

A continuación, configura el sistema de coordenadas de los datos POS  .
.

En cuanto a la precisión de las coordenadas, al importar datos POS desde el LiDAR generalmente se establece por defecto una alta precisión.

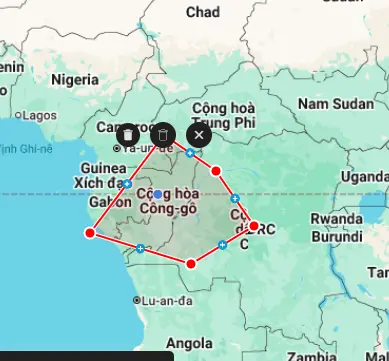
Una vez completada la configuración, haz clic en Confirmar. Si hay errores o datos innecesarios, puedes usar la función Eliminar por región (haz clic con el botón izquierdo del ratón para dibujar un área y haz doble clic para finalizar) para eliminar los datos POS y las fotos correspondientes.
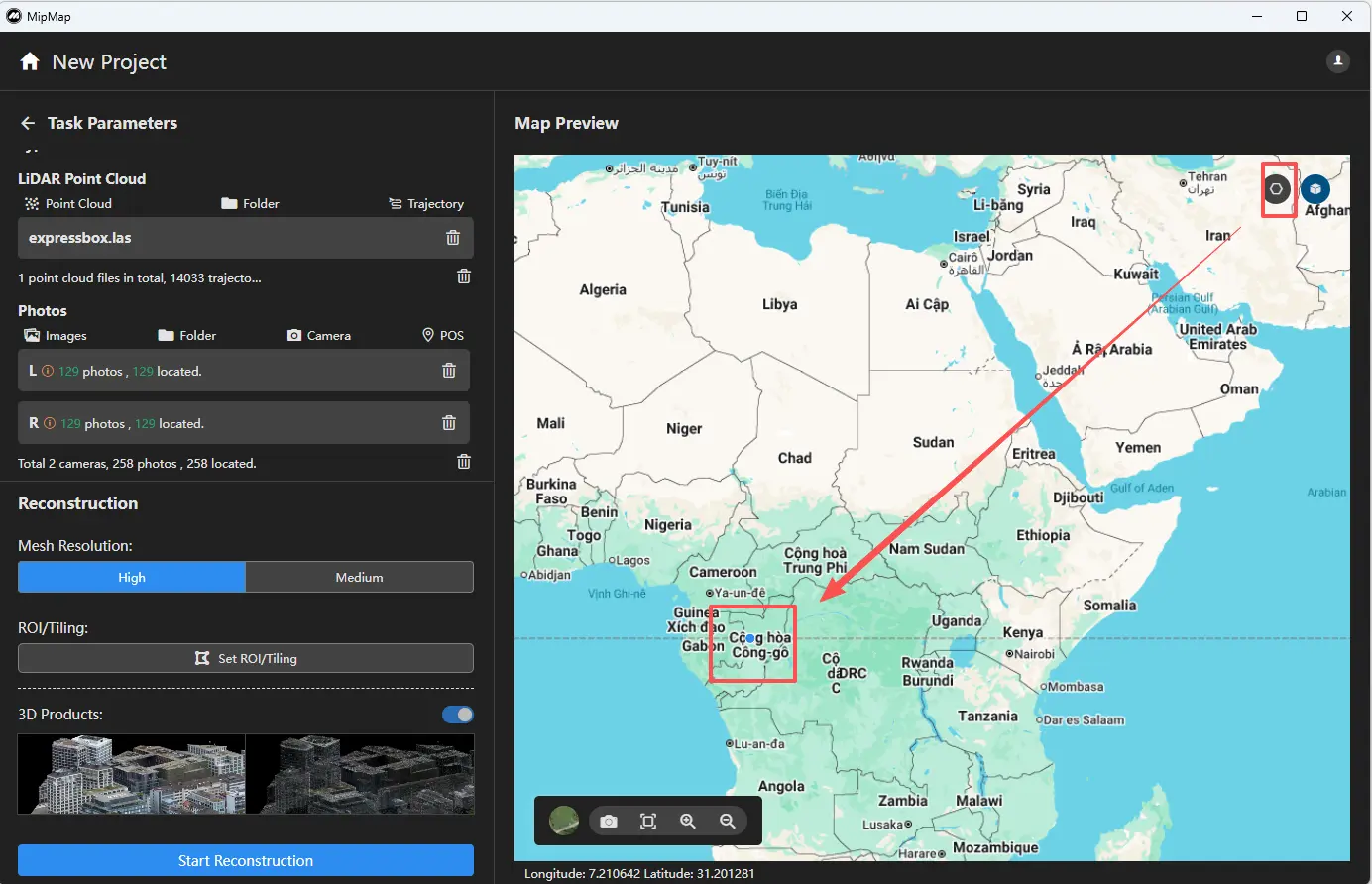
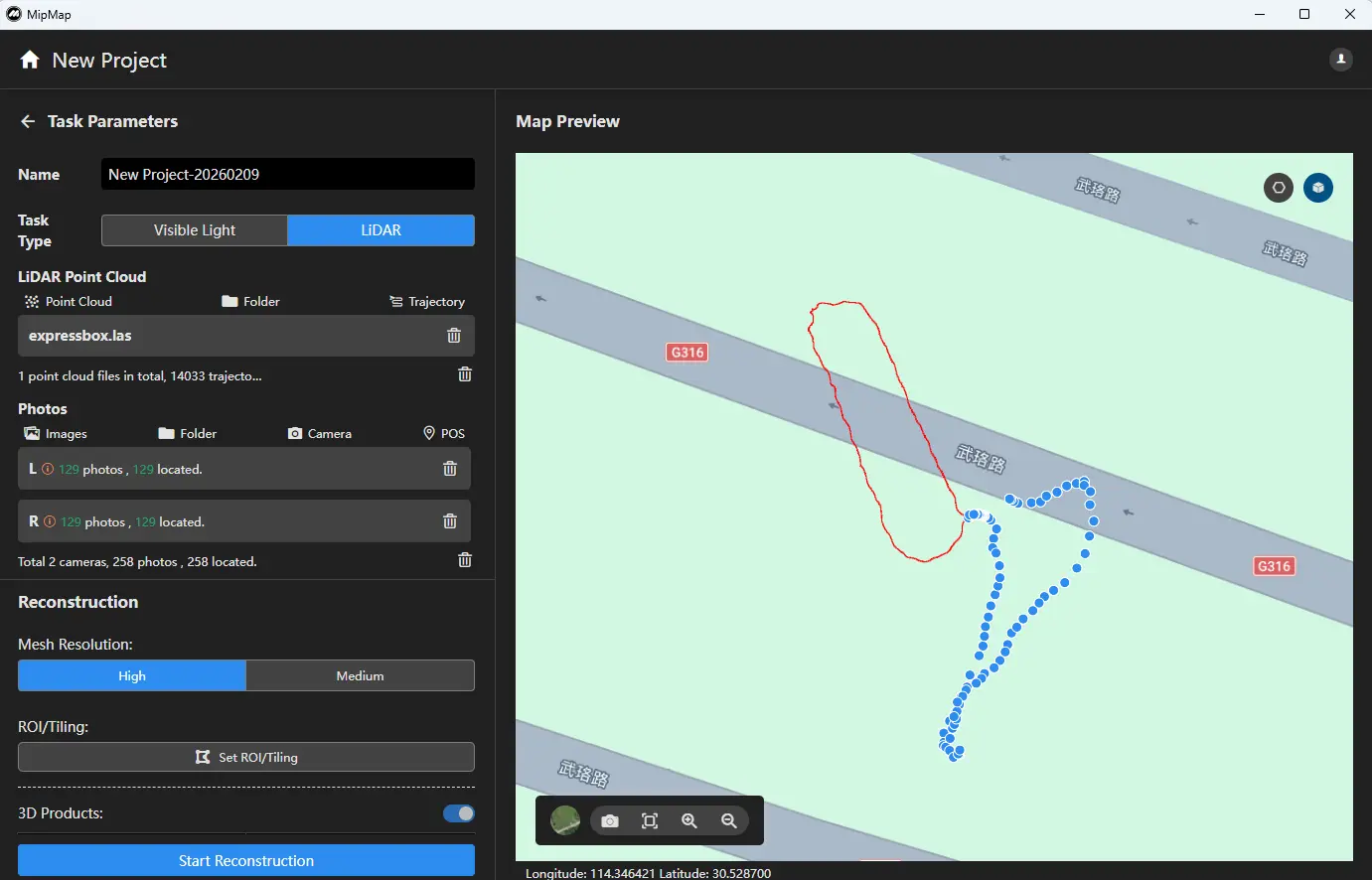
Si la configuración es correcta, se mostrará una vista previa en el mapa después de la importación.
