4.2.1 Datenvorbereitung
Bevor Sie mit der Rekonstruktion von LiDAR-Daten beginnen, können die erforderlichen Daten im Voraus organisiert werden, um den nachfolgenden Rekonstruktionsprozess zu erleichtern.
Allgemein benötigte Daten
- LiDAR-Punktwolken-Dateien (unterstützte Formate: .las, .laz)
- Trajektorien-Dateien (unterstützte Formate: .csv, .text, .txt)
- Fotodaten (unterstützte Formate: .jpg, .jpeg, .tif, .tiff, .png)
- Foto-POS-Daten (unterstützte Formate: .csv, .text, .txt)
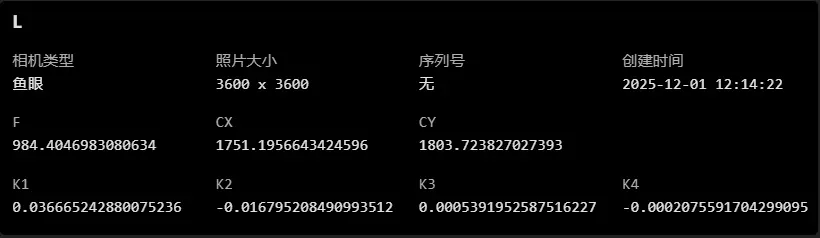
- Kameraparameter (LiDAR-Daten verwenden in der Regel eine Fischaugenkamera). Erforderliche Parameter: Brennweite, Hauptpunkt XY, K1, K2, K3, K4.
Wenn entzerrte (undistorted) Bilder verwendet werden, sind nur folgende Parameter erforderlich: Brennweite und Hauptpunkt XY.
Im Allgemeinen wird empfohlen, vorrangig Fischaugenbilddaten zu verwenden, da diese ein größeres Sichtfeld bieten.
Organisation der Fotodaten
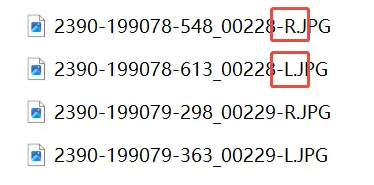
LiDAR-Fischaugenfotos müssen nach Kamera getrennt werden. Die Fotodaten können im Voraus entsprechend jeder Kamera in separate Ordner aufgeteilt werden.

Hinweise
- Die Koordinatensysteme der Trajektorie und der POS-Daten müssen korrekt eingestellt werden und mit den tatsächlichen Koordinatenwerten der Daten übereinstimmen.
- Zeitstempel und Koordinatensystem der Trajektorie müssen mit der Punktwolke übereinstimmen.
- Die POS-Daten müssen eine Spalte mit dem Fotonnamen zur Zuordnung zu den Bildern enthalten, und die verwendeten Orientierungswinkel müssen konfiguriert werden. Wenn mehrere Orientierungsparameter vorhanden sind, wird in der Regel die Verwendung von Quaternionen empfohlen.
(Wenn entzerrte Bilder verwendet werden, sollte die Orientierung auf „Keine“ gesetzt werden, und entsprechende Orientierungsspalten müssen nicht konfiguriert werden.) - Fotos müssen vollständig nach Kamera importiert werden. Befinden sich alle Bilder im selben Ordner, wird empfohlen, sie vor dem Import in separate Kameraordner zu sortieren.