4.2.4 Импорт фотографий и POS
Импорт фотографий
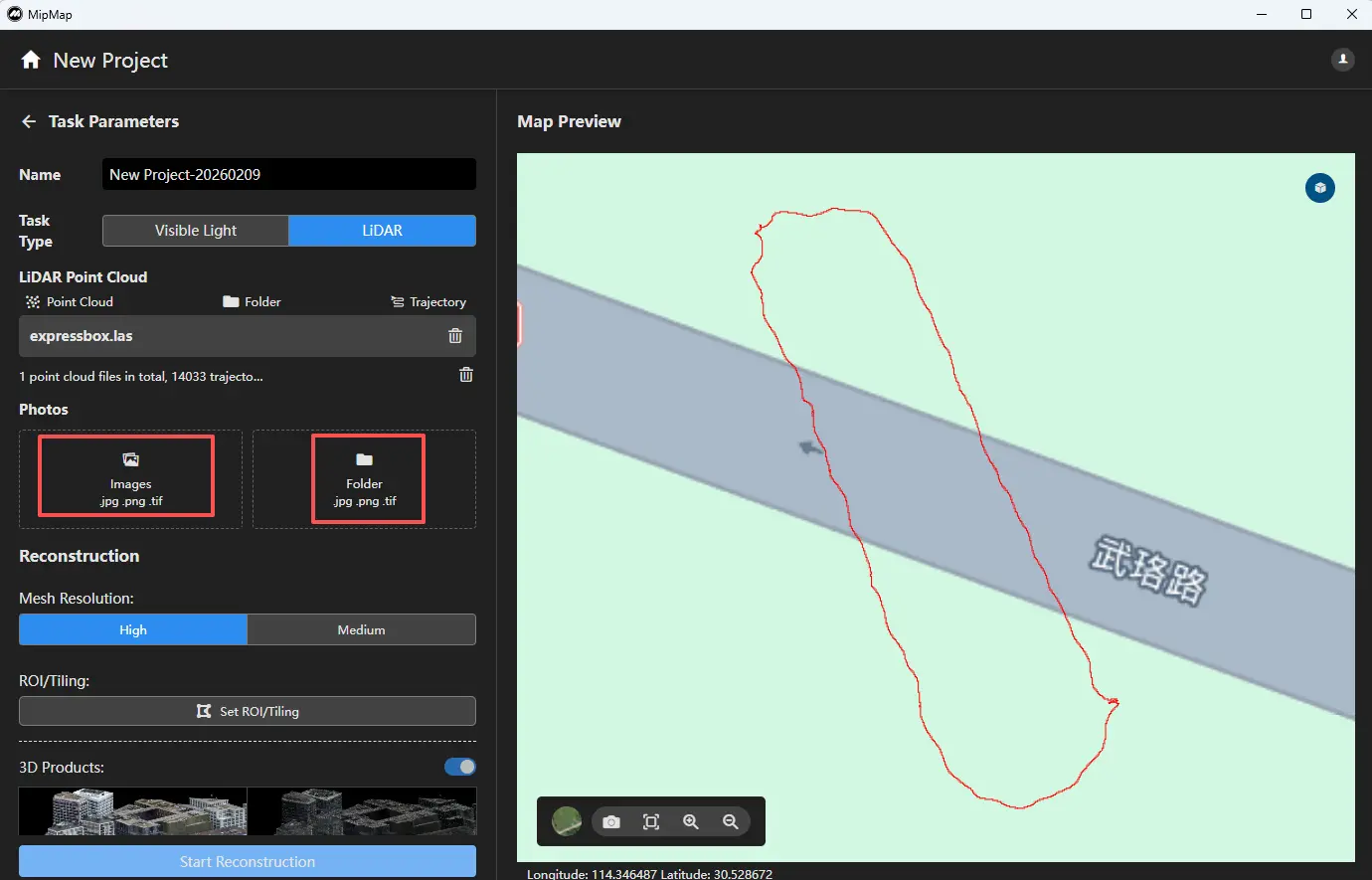
В параметрах задачи слева можно импортировать данные изображений по файлу или по папке.
- Функция Импорт изображений позволяет выбрать отдельные фотографии в папке, которые будут участвовать в реконструкции.
- Функция Импорт папки импортирует все данные изображений из выбранной папки (включая подпапки) в задачу.
Если в информации о фотографии содержатся данные о местоположении, программа автоматически их считает.
Внимание: изображения «рыбий глаз» LiDAR необходимо разделять по камерам и импортировать в соответствии с каждой камерой.
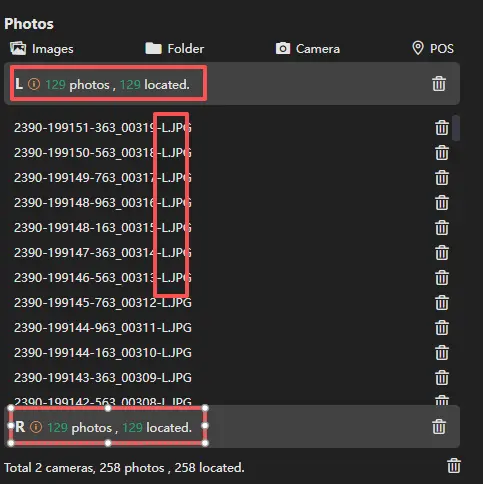
После импорта фотографий можно использовать функции над списком для продолжения импорта. Также можно нажать значок удаления справа, чтобы удалить фотографии камеры.

Импорт POS
Выше списка фотографий можно нажать на функцию POS, чтобы открыть интерфейс POS. Для данных LiDAR рекомендуется импортировать и использовать координаты и параметры ориентации из файла POS.

Нажмите Импорт файла POS ![]() , выберите соответствующий файл, задайте используемые углы ориентации и укажите столбцы имени, XYZ и углов ориентации. После завершения настроек нажмите Подтвердить.
, выберите соответствующий файл, задайте используемые углы ориентации и укажите столбцы имени, XYZ и углов ориентации. После завершения настроек нажмите Подтвердить.

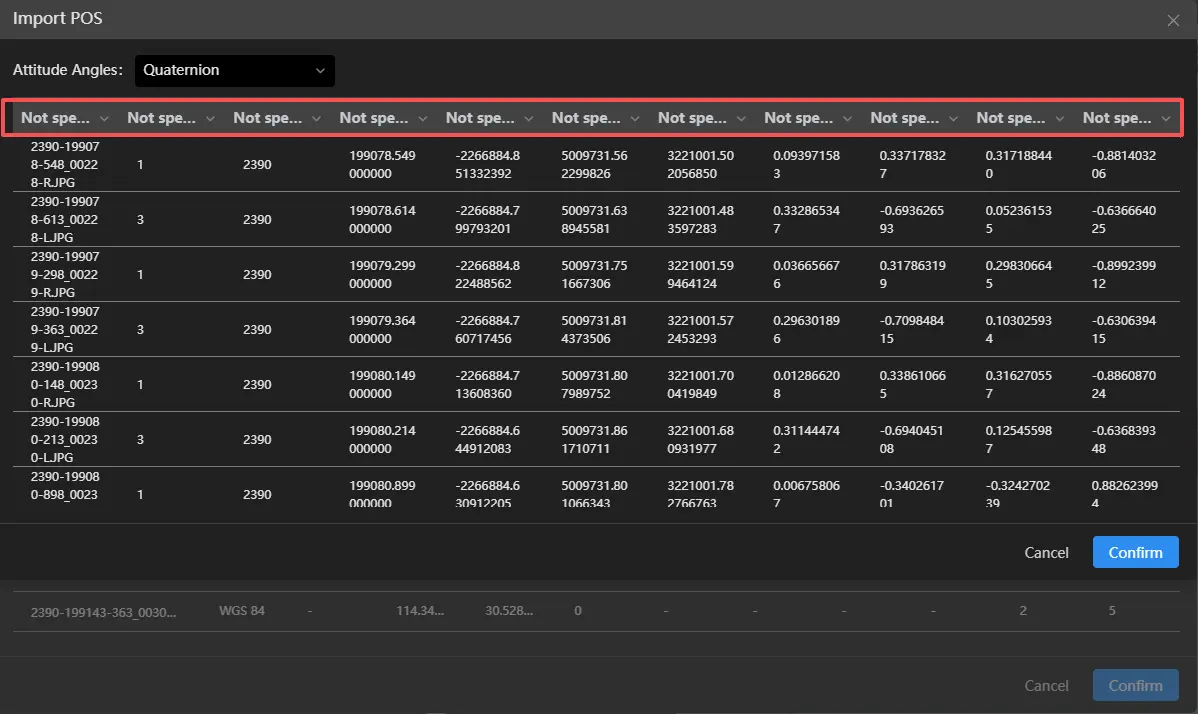
Затем настройте систему координат для данных POS  .
.

Для точности координат при импорте POS-данных от LiDAR по умолчанию используется высокая точность.

После завершения настроек нажмите Подтвердить. Если есть ошибки или ненужные данные, можно использовать функцию Удаление по области (щелчок левой кнопкой мыши для рисования области, двойной щелчок для завершения), чтобы удалить соответствующие POS и фотографии.
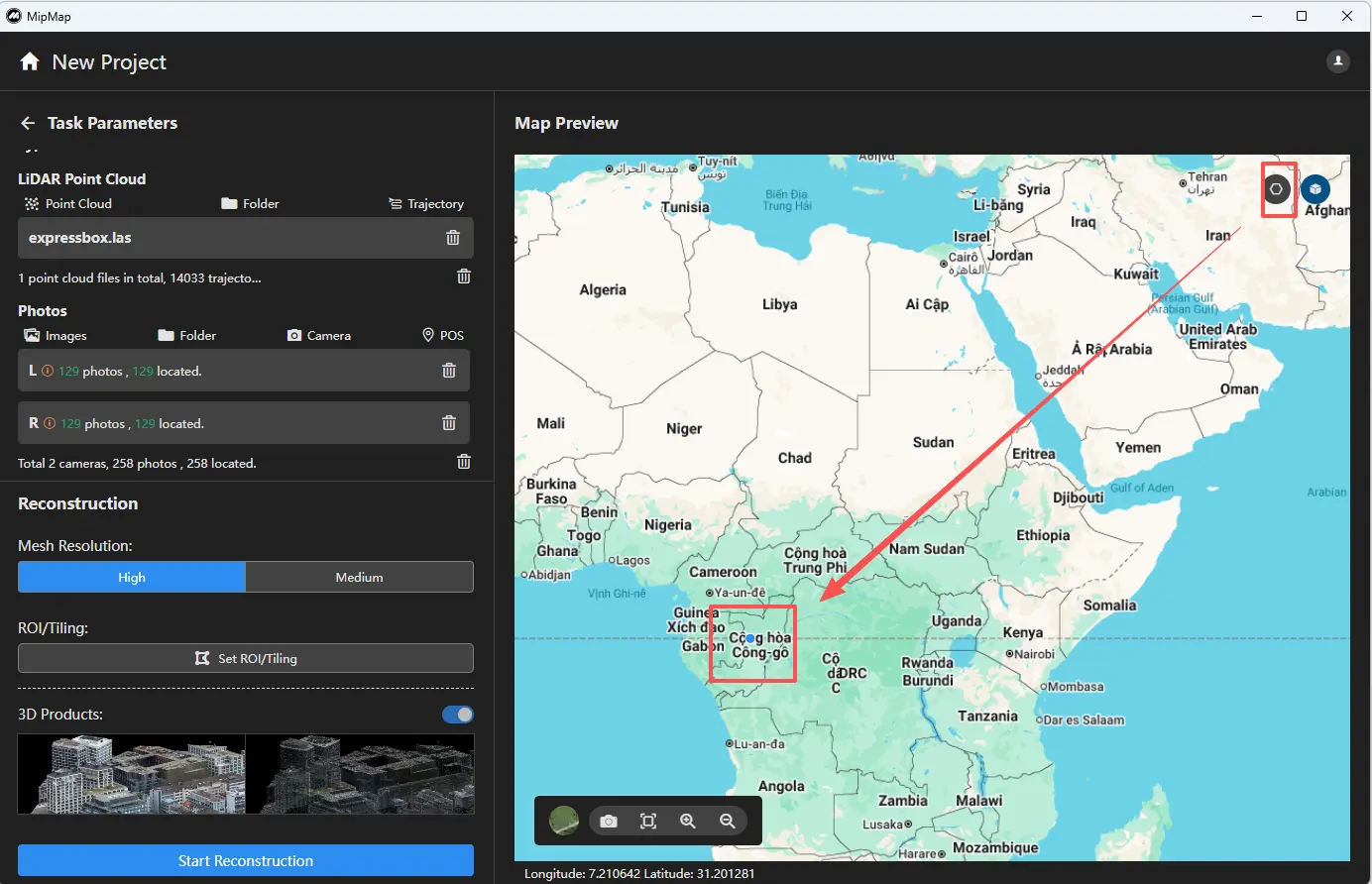
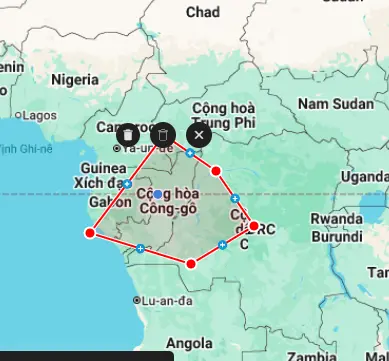
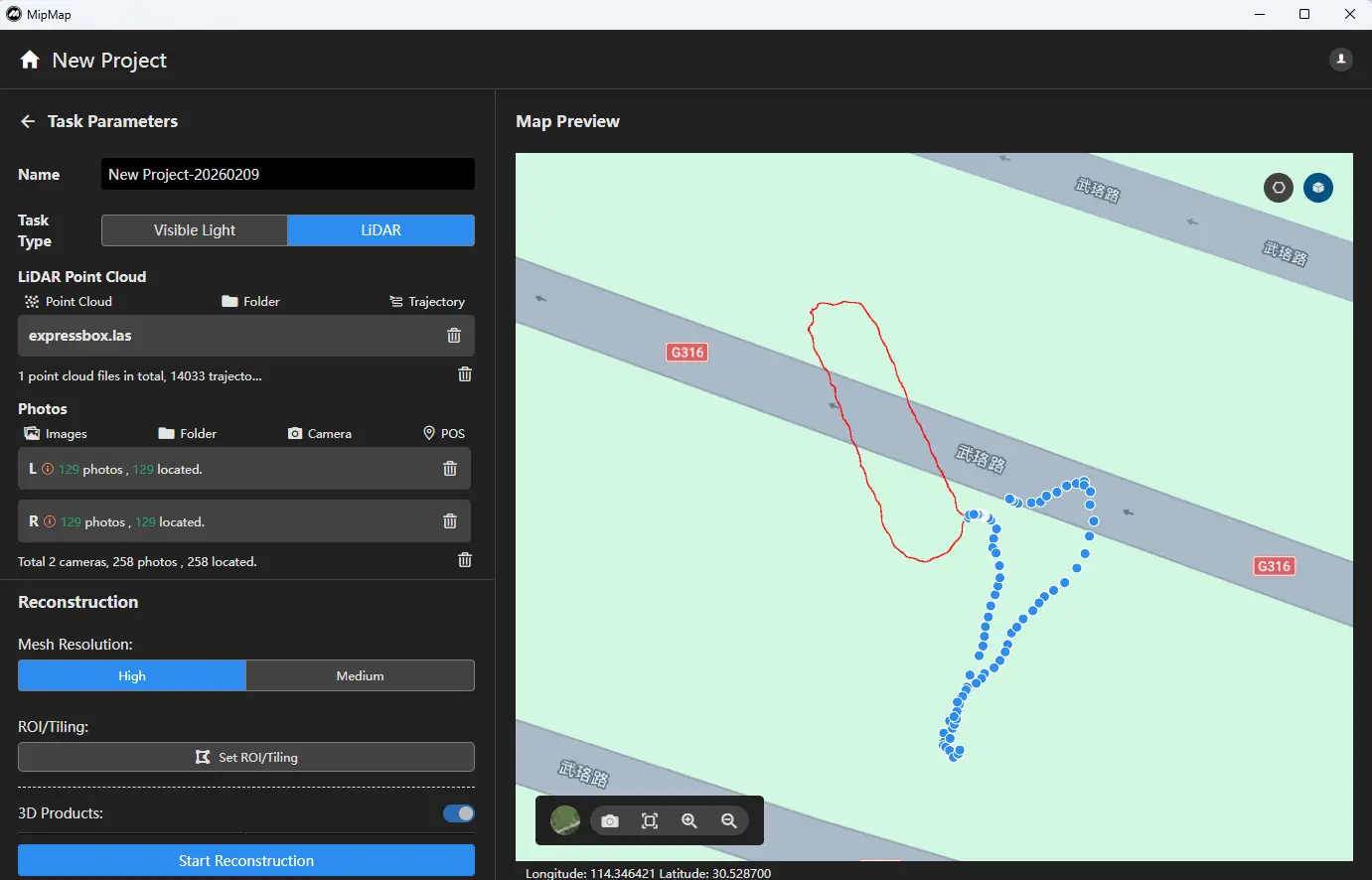
При корректной настройке после импорта на карте отобразится предварительный результат.
