4.2.4 Importar fotos e POS
Importar fotos
Nos parâmetros de tarefa à esquerda, é possível importar dados de imagens por arquivo ou por pasta.
- A função Importar imagens permite selecionar individualmente, dentro de uma pasta, as fotos que participarão da reconstrução.
- A função Importar pasta importará todos os dados de imagem presentes na pasta selecionada (incluindo subpastas) para a tarefa.
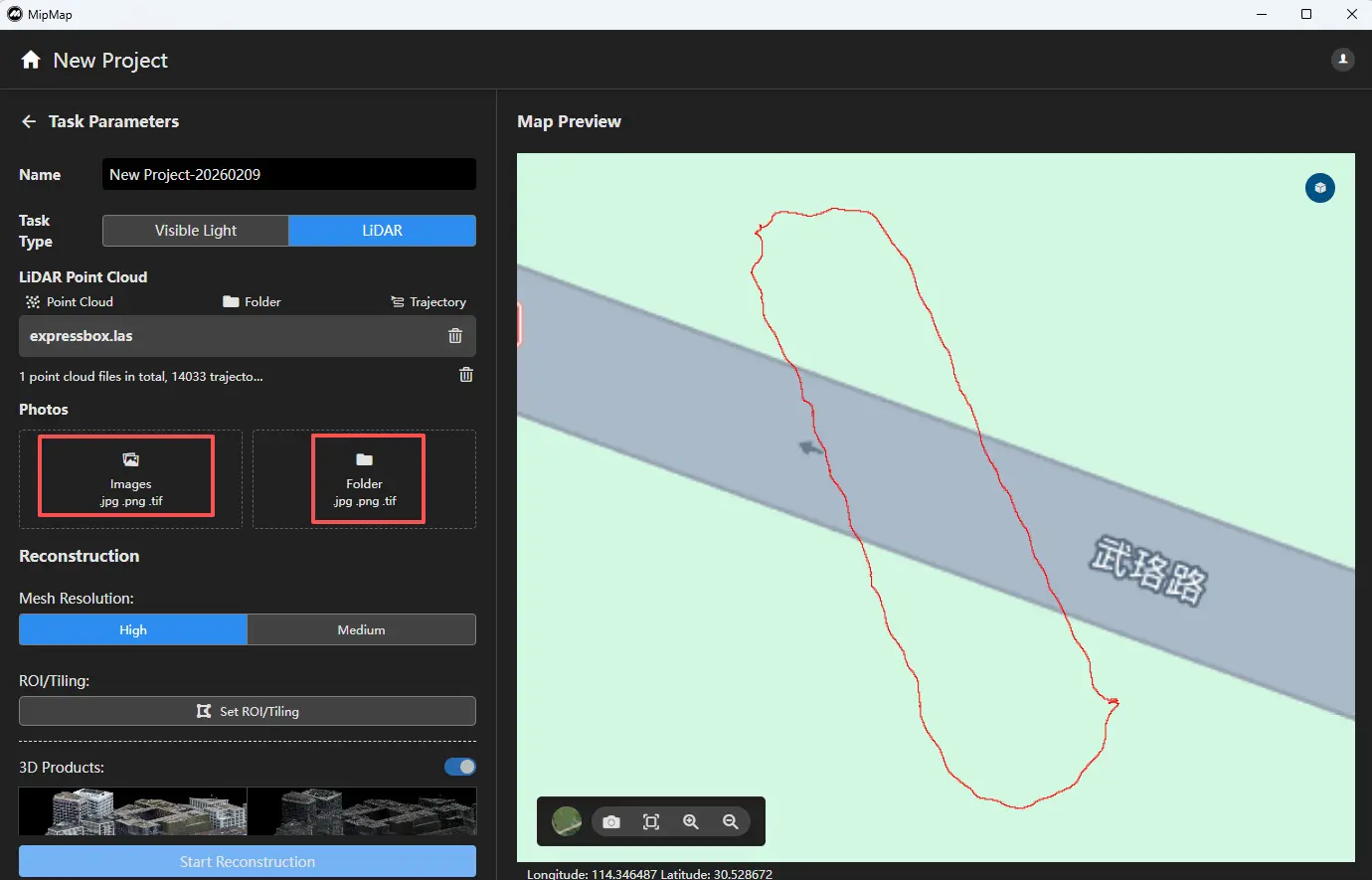
Se as informações da foto contiverem dados de localização, o software irá lê-los automaticamente.
Atenção: As imagens fisheye do LiDAR precisam ser diferenciadas por câmera e importadas de acordo com a câmera correspondente.
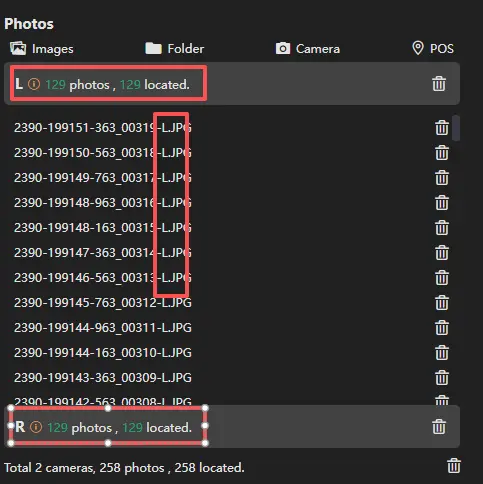
Após importar as fotos, você pode usar as funções acima da lista para continuar a importação. Também é possível clicar no ícone de exclusão à direita para remover as fotos da câmera.

Importar POS
Pode clicar na função POS acima das fotos para abrir o painel POS. Para dados de LiDAR, recomenda-se geralmente importar e utilizar as informações de coordenadas e atitude contidas no ficheiro POS.

Clique em Importar arquivo POS ![]() , selecione o arquivo correspondente, defina o tipo de ângulos de atitude utilizado e atribua as colunas de nome, XYZ e ângulos de atitude. Após concluir a configuração, clique em Confirmar.
, selecione o arquivo correspondente, defina o tipo de ângulos de atitude utilizado e atribua as colunas de nome, XYZ e ângulos de atitude. Após concluir a configuração, clique em Confirmar.

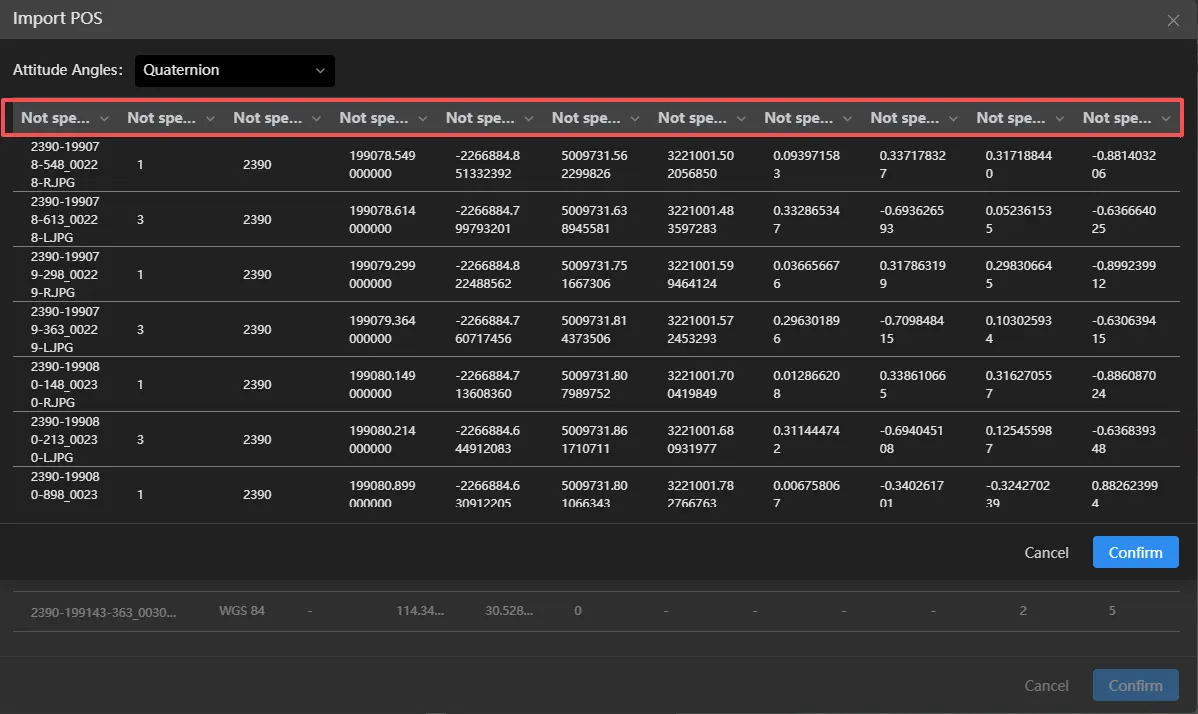
Em seguida, configure o sistema de coordenadas dos dados POS  .
.

Para a precisão das coordenadas, ao importar dados POS do LiDAR, normalmente assume-se por padrão uma alta precisão.

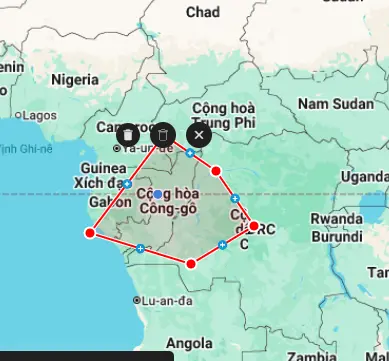
Após concluir as configurações, clique em Confirmar. Se houver erros ou dados desnecessários, é possível usar a função Excluir por área (clique com o botão esquerdo para desenhar a área e clique duas vezes para finalizar) para excluir os POS e as fotos correspondentes.
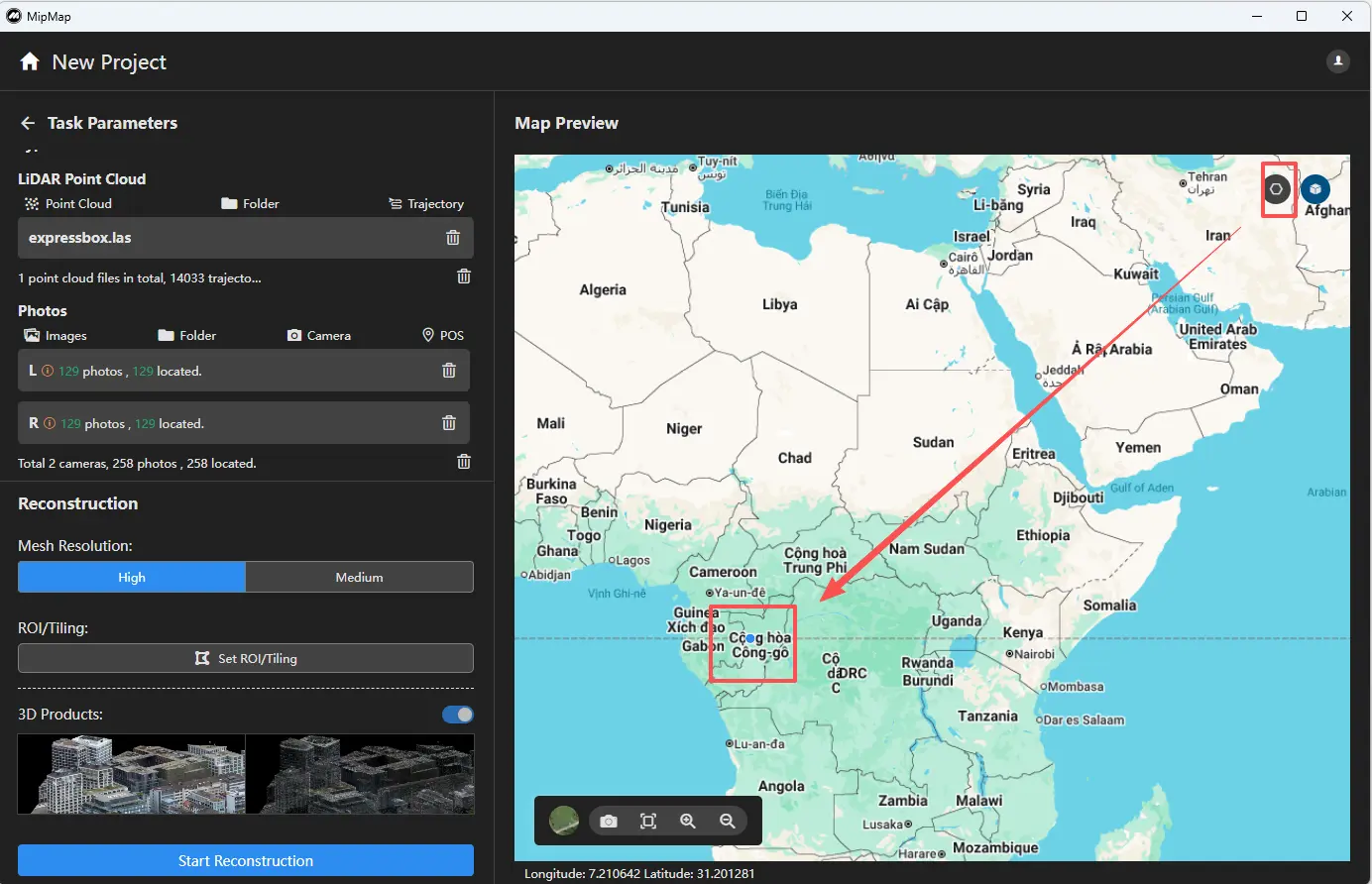
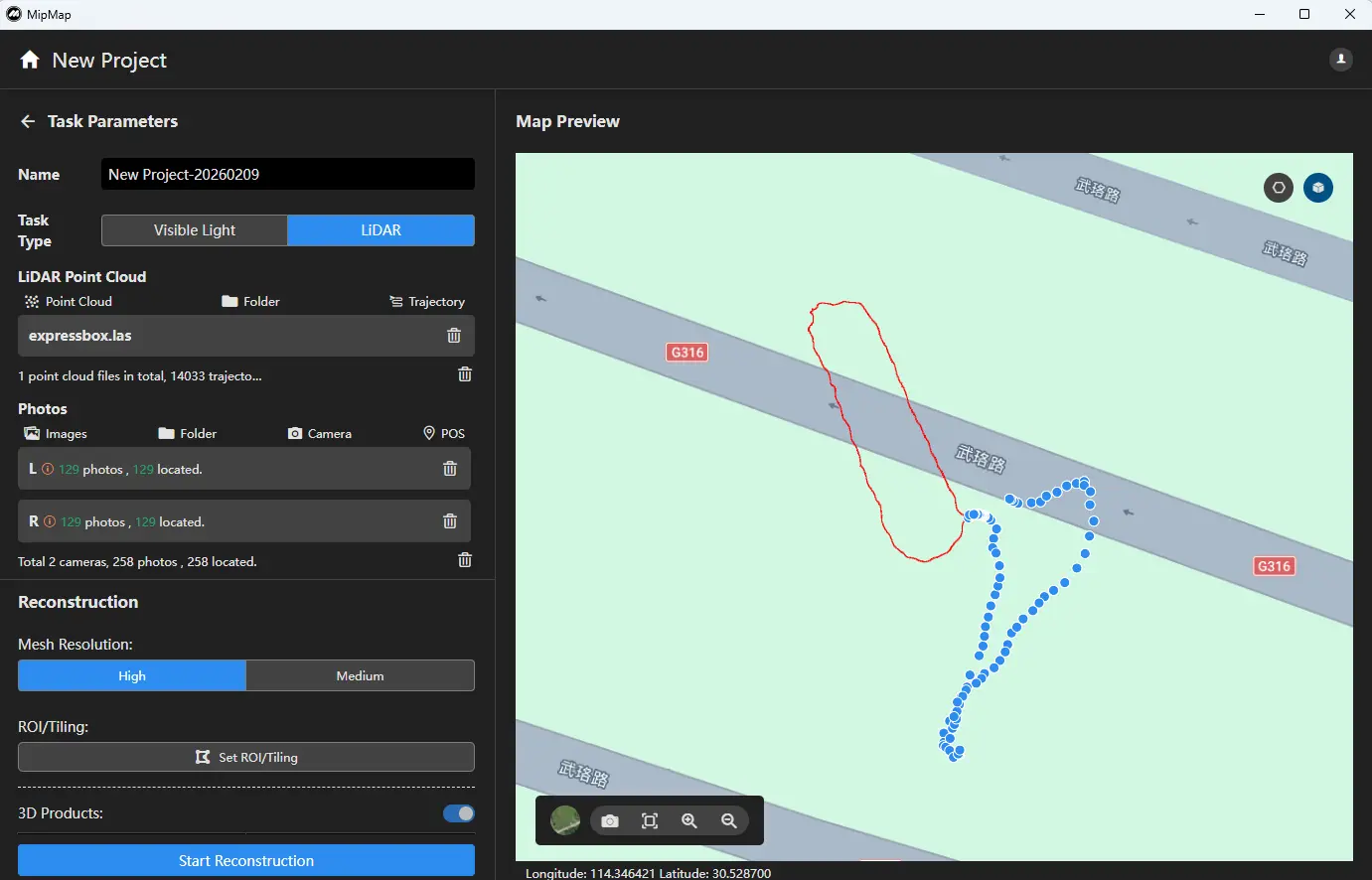
Se a configuração estiver correta, após a importação será exibido um resultado de pré-visualização no mapa.
