4.2.1 Подготовка данных
Перед началом реконструкции данных LiDAR рекомендуется заранее подготовить и организовать необходимые данные для последующей обработки.
Обычно требуемые данные
- Файлы облаков точек LiDAR (поддерживаемые форматы: .las, .laz)
- Файлы траектории (поддерживаемые форматы: .csv, .text, .txt)
- Фотоданные (поддерживаемые форматы: .jpg, .jpeg, .tif, .tiff, .png)
- POS-данные фотографий (поддерживаемые форматы: .csv, .text, .txt)
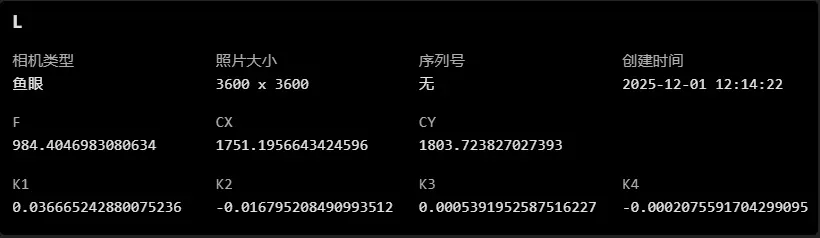
- Параметры камеры (для данных LiDAR обычно используется камера «рыбий глаз»). Требуемые параметры: фокусное расстояние, главная точка XY, K1, K2, K3, K4.
Если используются уже исправленные (undistorted) изображения, требуются только следующие параметры: фокусное расстояние и главная точка XY.
Как правило, рекомендуется в первую очередь использовать данные фотографий с объективом «рыбий глаз», так как они обеспечивают более широкий угол обзора.
Организация фотоданных
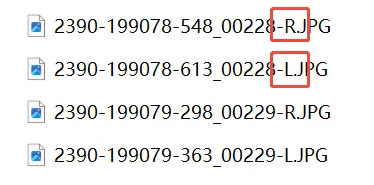
Фотографии с камеры «рыбий глаз» для LiDAR необходимо разделять по камерам. Фотоданные можно заранее распределить по папкам в соответствии с каждой камерой.

Важные замечания
- Системы координат траектории и POS должны быть настроены корректно и соответствовать фактическим значениям координат данных.
- Временные метки и система координат траектории должны совпадать с данными облака точек.
- В POS-данных должна присутствовать колонка с именем фотографии для сопоставления с изображениями, а также должны быть заданы используемые углы ориентации. Если доступно несколько параметров ориентации, обычно рекомендуется использовать кватернионы.
(Если используются изображения без искажений, параметр углов ориентации следует установить как «нет» и соответствующие колонки настраивать не требуется.) - Фотографии должны быть полностью импортированы с разделением по камерам. Если все изображения находятся в одной папке, рекомендуется заранее распределить их по разным папкам перед импортом.