4.2.1 Preparação de dados
Antes de iniciar a reconstrução de dados LiDAR, é possível organizar previamente os dados necessários para a reconstrução, de modo a facilitar o processamento posterior.
Dados geralmente necessários
- Ficheiros de nuvem de pontos LiDAR (formatos suportados: .las, .laz)
- Ficheiros de trajetória (formatos suportados: .csv, .text, .txt)
- Dados fotográficos (formatos suportados: .jpg, .jpeg, .tif, .tiff, .png)
- POS das fotografias (formatos suportados: .csv, .text, .txt)
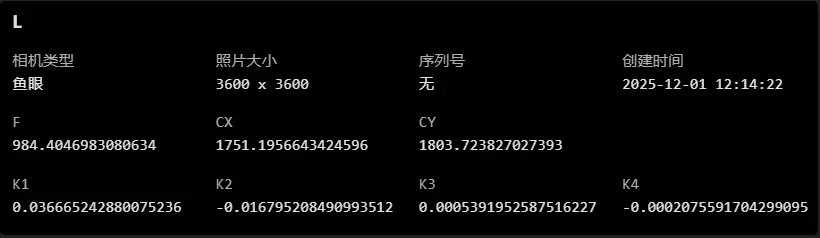
- Parâmetros da câmara (os dados LiDAR utilizam normalmente câmaras olho-de-peixe), parâmetros necessários: distância focal, ponto principal XY, K1, K2, K3, K4.
Caso sejam utilizadas imagens já sem distorção (undistorted), apenas são necessários: distância focal e ponto principal XY.
De modo geral, recomenda-se dar prioridade ao uso de imagens de câmara olho-de-peixe, pois oferecem um campo de visão mais amplo.
Organização dos dados fotográficos
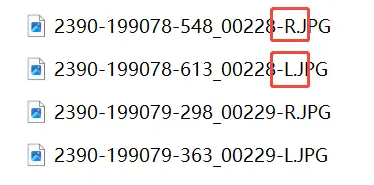
As fotografias olho-de-peixe LiDAR devem ser separadas por câmara. Os dados fotográficos podem ser previamente organizados em pastas distintas de acordo com cada câmara.

Observações importantes
- Os sistemas de coordenadas da trajetória e do POS devem ser configurados corretamente e corresponder aos valores reais dos dados.
- O carimbo temporal e o sistema de coordenadas da trajetória devem ser consistentes com os da nuvem de pontos.
- Os dados POS devem conter uma coluna com o nome das fotografias para correspondência com as imagens, e deve ser definido o tipo de ângulo de orientação utilizado. Caso existam vários parâmetros de orientação, recomenda-se geralmente o uso de quaterniões.
(Se forem utilizadas imagens sem distorção, o parâmetro de orientação deve ser definido como “nenhum” e não é necessário configurar colunas de orientação.) - As fotografias devem ser importadas integralmente por câmara. Caso estejam na mesma pasta, recomenda-se organizá-las previamente em pastas separadas antes da importação.