4.2.1 Preparazione dei dati
Prima di avviare la ricostruzione dei dati LiDAR, è possibile organizzare in anticipo i dati necessari, in modo da facilitare le fasi successive del processo.
Dati generalmente necessari
- File di nuvole di punti LiDAR (formati supportati: .las, .laz)
- File di traiettoria (formati supportati: .csv, .text, .txt)
- Dati fotografici (formati supportati: .jpg, .jpeg, .tif, .tiff, .png)
- POS delle fotografie (formati supportati: .csv, .text, .txt)
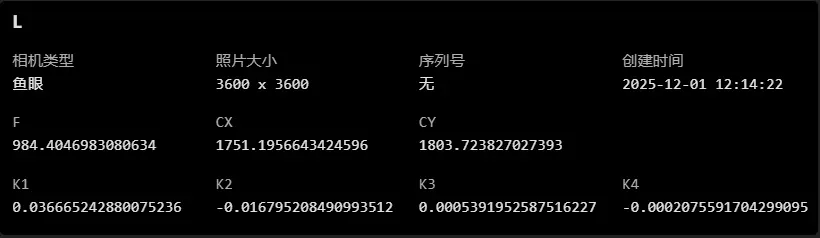
- Parametri della fotocamera (i dati LiDAR utilizzano generalmente una fotocamera fisheye), parametri richiesti: lunghezza focale, punto principale XY, K1, K2, K3, K4.
Se si utilizzano immagini già corrette dalla distorsione (undistorted), sono necessari solo: lunghezza focale e punto principale XY.
In generale, si consiglia di utilizzare prioritariamente le immagini fisheye, poiché offrono un campo visivo più ampio.
Organizzazione dei dati fotografici
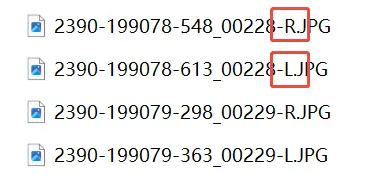
Le fotografie fisheye LiDAR devono essere distinte per fotocamera. I dati fotografici possono essere suddivisi in cartelle separate per ciascuna fotocamera prima dell’importazione.

Note importanti
- I sistemi di coordinate della traiettoria e del POS devono essere configurati correttamente e coerenti con i valori reali dei dati.
- Il timestamp e il sistema di coordinate della traiettoria devono essere coerenti con quelli della nuvola di punti.
- I dati POS devono includere una colonna con il nome delle fotografie per la corrispondenza con le immagini e deve essere impostato il tipo di angoli di orientamento utilizzato. Se sono presenti più parametri di orientamento, si consiglia generalmente di utilizzare i quaternioni.
(Se si utilizzano immagini senza distorsione, l’angolo di orientamento deve essere impostato su “nessuno” e non è necessario configurare le relative colonne.) - Le fotografie devono essere importate completamente per ciascuna fotocamera. Se si trovano nella stessa cartella, si consiglia di organizzarle in cartelle separate prima dell’importazione.