4.2.1 Data Preparation
Before starting LiDAR data reconstruction, you can organize the required data in advance to facilitate the reconstruction process.
Generally Required Data
- LiDAR point cloud files (supported formats: .las, .laz)
- Trajectory files (supported formats: .csv, .text, .txt)
- Photo data (supported formats: .jpg, .jpeg, .tif, .tiff, .png)
- Photo POS data (supported formats: .csv, .text, .txt)
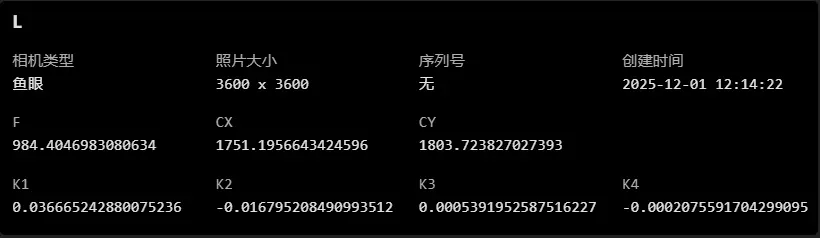
- Camera parameters (LiDAR data typically uses a fisheye camera). Required parameters: focal length, principal point XY, K1, K2, K3, K4.
If using undistorted images, only the following parameters are required: focal length and principal point XY.
In general, it is recommended to prioritize fisheye image data, as it provides a wider field of view.
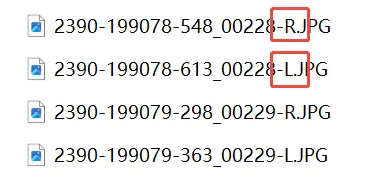
Organizing Photo Data
LiDAR fisheye photos must be separated by camera. Photo data can be pre-arranged into folders according to each camera.

Notes
- The coordinate systems of the trajectory and POS must be set correctly and match the actual data coordinate values.
- The trajectory timestamp and coordinate system must be consistent with the point cloud.
- POS data must include a photo name column for matching with photos, and the orientation angles must be configured. If multiple orientation parameters are available, using quaternions is generally recommended.
(If undistorted images are used, set the orientation option to “None” and do not configure orientation parameter columns.) - Photos must be fully imported by camera. If they are in the same folder, it is recommended to organize them into separate folders by camera before importing.