4.2.1 数据准备
在开始激光雷达数据重建之前,可以预先整理好重建所需数据,以便后续进行重建。
一般所需数据
- 雷达点云文件(支持格式.las、.laz)
- 轨迹线文件(支持格式.csv、.text、.txt)
- 照片数据(支持格式.jpg、.jpeg、.tif、.tiff、.png)
- 照片POS(支持格式.csv、.text、.txt)
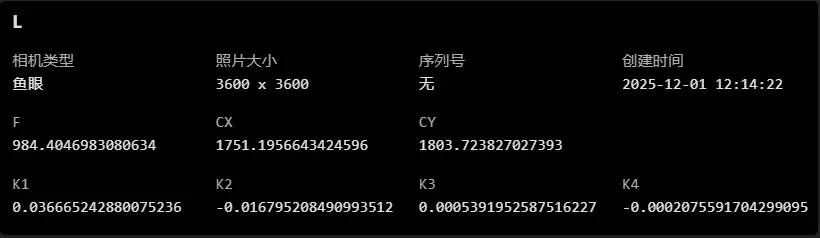
- 相机参数(激光雷达数据一般为鱼眼相机),所需参数:焦距、像主点XY、K1、K2、K3、K4,如果使用去畸变照片,相机参数则只需:焦距、像主点XY。
一般推荐优先使用鱼眼照片数据,视场角更广。
照片数据整理
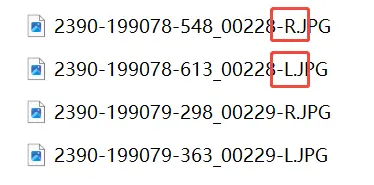
激光雷达鱼眼照片需区分相机,照片数据可预先按相应相机划分好文件夹。

注意事项
- 轨迹线和POS坐标系需设置正确,与实际数据坐标值相符。
- 轨迹线的时间戳和坐标系必须和点云一致。
- pos数据需要有照片名称列以用于和照片匹配,且需设置采用的姿态角,如有多个姿态角参数,一般推荐使用四元数。(如果使用的是去畸变图像则姿态角选择无,不设置相应姿态角参数列)
- 照片需分相机全部导入,如在同一个文件夹中,可提前整理到不同文件夹内再导入。