4.2.1 데이터 준비
LiDAR 데이터 재구성을 시작하기 전에, 재구성에 필요한 데이터를 미리 정리해 두면 이후 작업을 보다 원활하게 진행할 수 있습니다.
일반적으로 필요한 데이터
- LiDAR 포인트 클라우드 파일 (지원 형식: .las, .laz)
- 궤적 파일 (지원 형식: .csv, .text, .txt)
- 사진 데이터 (지원 형식: .jpg, .jpeg, .tif, .tiff, .png)
- 사진 POS 데이터 (지원 형식: .csv, .text, .txt)
- 카메라 파라미터 (LiDAR 데이터는 일반적으로 어안 카메라 사용), 필요한 파라미터: 초점 거리, 주점 XY, K1, K2, K3, K4.
만약 왜곡 보정된(undistorted) 사진을 사용하는 경우에는 초점 거리와 주점 XY만 필요합니다.
일반적으로 더 넓은 시야각을 확보할 수 있으므로 어안 사진 데이터를 우선적으로 사용하는 것을 권장합니다.
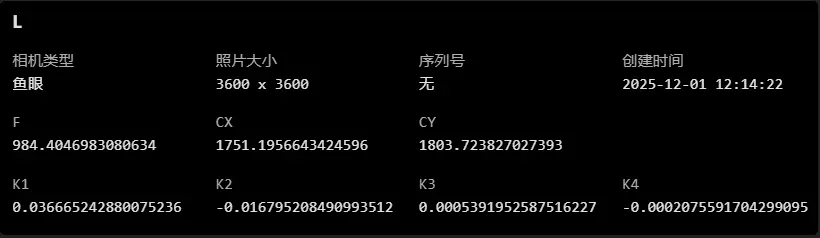
사진 데이터 정리
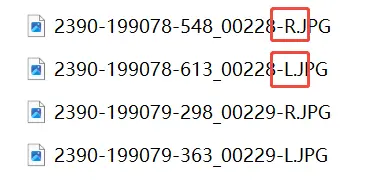
LiDAR 어안 사진은 카메라별로 구분해야 합니다. 사진 데이터는 카메라별로 폴더를 미리 나누어 정리한 후 가져올 수 있습니다.

주의 사항
- 궤적과 POS 좌표계는 실제 데이터의 좌표값과 일치하도록 정확히 설정해야 합니다.
- 궤적의 타임스탬프와 좌표계는 포인트 클라우드와 반드시 일치해야 합니다.
- POS 데이터에는 사진과 매칭하기 위한 사진 이름 컬럼이 포함되어야 하며, 사용할 자세 각(orientation angle)을 설정해야 합니다. 여러 자세 파라미터가 있는 경우 일반적으로 쿼터니언 사용을 권장합니다.
(왜곡 보정 이미지를 사용하는 경우 자세 각은 “없음”으로 설정하고 관련 자세 컬럼을 설정할 필요가 없습니다.) - 사진은 카메라별로 모두 가져와야 합니다. 동일한 폴더에 있는 경우, 가져오기 전에 카메라별로 다른 폴더로 정리하는 것을 권장합니다.